|
Показатели |
обозначения |
Численные значения |
|
1.Производительность, т/ч |
Qmax |
7000 |
|
2.Длина конвейера, м |
LK |
460 |
|
3.Угол наклона конвейера, град |
|
15 |
|
4.Скорость движения ленты, м/с |
vфак |
3,15 |
|
5.Лента: тип ленты, ширина ленты |
РТЛОМ-5000×2000 ТУ 381051531-82 |
|
|
6.Масса груза приведённая к одному метру длины ленты, кг/м |
qг |
617,28 |
|
7.Погонная масса роликоопор нижней ветви ленты, кг/м |
qpII |
44,6 |
|
8. Погонная масса роликоопор верхней ветви ленты, кг/м |
qpI |
109 |
|
9.Масса одного метра длины ленты, кг/м |
qл |
106 |
|
10.Расстояние между роликоопорами верхней ветви ленты, м |
lpI |
1,1 |
|
11. Расстояние между роликоопорами нижней ветви ленты, м |
lpII |
2,2 |
|
12.Тяговый фактор приводных барабанов,
|
A |
6,59 |
Масса груза, приведенная к одному метру длины ленты:
 , кг/м
, кг/м
Массу одного метра длины ленты принимаем из характеристики тросовых лент [1].
Масса вращающихся частей роликоопор верхней ветви ленты, приведённая к одному метру длины ленты определяется:
 , кг/м;
, кг/м;
где ![]() -
масса вращающихся частей роликоопор грузовой ветви, кг.
-
масса вращающихся частей роликоопор грузовой ветви, кг.
 , кг;
, кг;
где А и Б - эмпирические коэффициенты, принимающиеся в зависимости от вида роликоопор и её использования [1] ( А = 10 кг/м, Б = 12 кг/м);
Dp - диаметр ролика, мм (Dp = 168 - для конвейеров с В = 2000 мм) [1];
![]() =1,1м
- расстояние между роликоопорами верхней ветви ленты (принимают в зависимости
от ширины ленты и плотности транспортируемого груза) [1].
=1,1м
- расстояние между роликоопорами верхней ветви ленты (принимают в зависимости
от ширины ленты и плотности транспортируемого груза) [1].
 ,кг;
,кг;
 , кг/м
, кг/м
Масса вращающихся частей роликоопор нижней ветви ленты, приведённая к одному метру длины ленты определяется:
 , кг;
, кг;
где  -
98,1 кг- масса вращающихся частей роликоопор порожней ветви;
-
98,1 кг- масса вращающихся частей роликоопор порожней ветви;
![]() =
(2÷3)
=
(2÷3) ![]() - расстояние между роликоопорами
верхней ветви ленты ( для конвейеров открытых горных разработок
- расстояние между роликоопорами
верхней ветви ленты ( для конвейеров открытых горных разработок ![]() =2,2 м),м.
=2,2 м),м.
 ,кг/м.
,кг/м.
Значение тягового фактора двухбарабанного привода определяется:
 ,
,
где ![]() = 260° = 6,28 рад. - суммарный угол
обхвата лентой приводных барабанов;
= 260° = 6,28 рад. - суммарный угол
обхвата лентой приводных барабанов;
![]() =
0,30 - коэффициент трения между приводным барабаном и рабочей стороной ленты [2].
=
0,30 - коэффициент трения между приводным барабаном и рабочей стороной ленты [2].
 .
.
5.3.1. Определение сил сопротивления движению на характерных участках контура ленточного конвейера
Определяя силы сопротивления движению на характерных участках контура ленточного конвейера необходимо заменить реальную конструктивную схему ленточного конвейера, изображённую на рисунке 5.7 на расчётную схему ленточного конвейера, изображённую на рисунке 5.8.
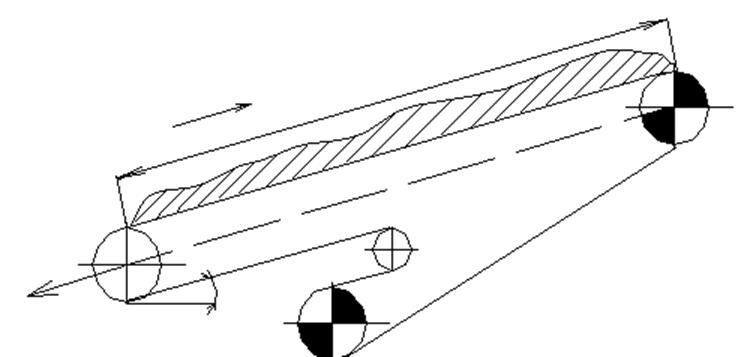
Рис.5.7. Реальная конструктивная схема наклонного ленточного конвейера
Значения сил сопротивления движению верхней и нижней ветвей ленты определяется по формулам:
- для незагруженной ветви:
 ,Н;
,Н;
где ![]() =
0,035 -эквивалентный коэффициент сопротивления движению ленты.
=
0,035 -эквивалентный коэффициент сопротивления движению ленты.
Знак угла ![]() принимаем
«+» (плюс) при движении ветви вверх и «-» (минус) при движении ветви вниз.
принимаем
«+» (плюс) при движении ветви вверх и «-» (минус) при движении ветви вниз.
Рис.5.8. Расчётная схема наклонного ленточного конвейера.
![]() ,Н
,Н
- для загруженной ветви:

 ,Н
,Н
- для нижней ветви:

 Н
Н
По умолчанию данным и в соответствии с расчётной схемой наклонного ленточного конвейера, строим диаграмму натяжения ленты, основываясь на положении о том, что натяжение каждой последующей точки длины конвейера изменяется на величину сопротивления на участке между этими точками. Диаграмма натяжении ленты представлена на рисунке 5.9.
![]() Sн, Н
Sн, Н
4
1
2,3
ось повсеместного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.