Учитывая, что большинство судов оборудовано дистанционным автоматическим управлением двигателя с мостика (ДАУ), судоводитель должен принимать во внимание эти обстоятельства, так как при тяжелом" гребном винте в деталях двигателя возникают повышенные тепловые напряжения, которые приводят к большому износу и даже выходу из строя важных деталей цилиндропоршневой группы двигателей. ДАУ позволяет судоводителю с мостика изменять режимы работы двигателя для обеспечения различных скоростей судна и изменения направления движения судна.
При ВФШ изменение направления хода судна (вперед, назад) обеспечивается реверсированием двигателя и соответственно изменением направления вращения ВФШ. Экономические режимы движения судна могут быть реализованы в этом случае только путем снижения частоты вращения двигателя, но при этом гребной винт, выбранный из условия обеспечения полного хода судна, становится неоптимальным.
15. Взаимодействие гребного винта и корпуса судна. Тяга и упор гребного винта. Попутный поток и засасывание.
Возмущеия в районе расположения гребного винта, вызываемые корпусом, могут существенно изменить условия обтекания его элементов, однако гребной винт также изменяет окружающий его поток, а следовательно, и условия обтекания корпуса. Следовательно, гидродинамические характеристики одного и того же гребного винта, работающего в свободной воде и за корпусом судна, будут различными, а сопротивление воды движению судна в присутствии работающего гребного винта будет отличаться от его буксировочного сопротивления.
Гребной винт условно рассматривают как изолированный, но работающий в потоке, измененном корпусом, а корпус судна рассматривают соответственно как буксируемый в потоке, измененном работой гребного винта.
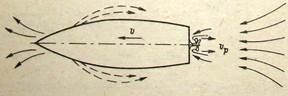
Попутный поток. При движении судно увлекает за собой близлежащие частицы воды, формируя так называемый попутный поток, направленный в сторону движения судна (рис. 6.14). Попутный поток, создаваемый корпусом судна и работающим за ним гребным винтом, называют эффективным попутным потоком. Его экспериментальное и тем более теоретическое определения сопряжены с большими трудностями. Поэтому обычно оценивают номинальный попутный поток, возникающий в месте расположения гребного винта у судна, буксируемого без винта. Номинальный попутный поток несколько отличается от эффективного, но в инженерных расчетах этим отличием, как правило, пренебрегают.
Попутный поток за корпусом судна неравномерен по величине и направлению, его скорости изменяются по радиусу и по окружности. Например, интенсивность попутного потока достигает максимума за ахтерштевнем, кронштейном гребного вала или кромкой руля, а минимума - по линиям, расположенным примерно по нормали к ахтерштевню.
Неравномерность попутного потока в месте расположения гребного винта объясняется главным образом неоднородностью его структуры, т. е. тем, что он состоит из нескольких относительно независимых составляющих, каждая из которых обладает своим характерным распределением скоростей.
Одной из таких составляющих является потенциальный попутный поток9 обусловленный полем скоростей вокруг изолированного корпуса, движущегося в идеальной жидкости при отсутствии трения и волнообразования. В этом случае судно при своем движении вытесняет частицы воды, которые в носу движутся вперед и в стороны, а в корме - вперед и внутрь, заполняя пустоту, непрерывно образующуюся за кормой.
Вторая составляющая попутного потока за кормой судна имеет вязкостную природу и обусловлена силами трения. Поэтому она называется попутным потоком трения.
Величина потенциального попутного потока зависит также от волнообразования в корме судна.
Засасывание. Как правило, гребные винты располагаются в кормовой оконечности судна (исключением являются некоторые морские паромы и ледоколы). Работая за корпусом судна, гребной винт подсасывает воду и увеличивает скорость обтекания кормовой оконечности судна. При этом в соответствии с законом Бернулли понижается давление во всей зоне, охваченной подсасывающим действием винта что увеличивает сопротивление формы:
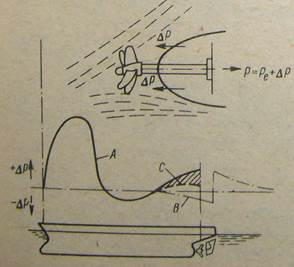
Кроме того, повышение скорости обтекания кормовой оконечности приводит к возрастанию сопротивления трения. Заштрихованная на рис. область соответствует уменьшению давления в корме от работы гребного винта. В результате этих явлений появляется дополнительная сила ∆P действующая на корпус и увеличивающая сопротивление воды движению судна. Эту силу принято называть силой засасывания. Таким образом, часть упора гребного винта, именуемая обычно полезной тягой Ре, затрачивается на преодоление сопротивления R, а остальная часть упора идет на преодоление силы засасывания, т. е. P=Ре+∆P.
18. Паспортная диаграмма судна, ее использование при буксировке и в штормовых условиях.
При решении многих судоводительских задач используют так называемую паспортную диаграмму судна:
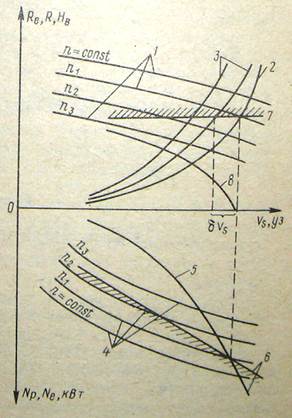
В верхней части паспортной диаграммы наносят кривые зависимости полезной тяги гребного винта при постоянной частоте вращения и кривую 2 буксировочного сопротивления чистого корпуса. Кроме того, здесь же могут наноситься кривые 3 полного сопротивления судна с учетом обрастания и старения корпуса, при движении в условиях ветра и волнения, при перемене осадки или с учетом сопротивления какого-либо буксируемого объекта.
В нижней части диаграммы строят кривые 4 мощности, потребляемой гребным винтом при постоянных значениях частоты его вращения, кривая 5 потребной мощности двигателя и ограничительная характеристика двигателя 6, называемая кривой располагаемой мощности.
Кривая 5 получается простым графическим построением - переносом из верхней части диаграммы точек пересечения кривых 1 с одной из кривых 3, соответствующей данным условиям, в нижнюю часть диаграммы на одну из кривых 4 в соответствии с частотой вращения винта (при постоянной скорости судна).
Кривая 6 с достаточной для судоводительских задач точностью может быть построена из условия постоянства вращающего момента двигателя при различных оборотах, т. е. из пропорции вида:

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.