12. Геометрические и кинематические характеристики гребных винтов. Конструктивные особенности винтов различных типов.
Основными элементами гребного винта являются ступица, представляющая собой тело вращения, и укрепленные на ней лопасти . Расстояние Rоси винта до конца лопасти (точки, наиболее удаленной от оси) - радиус винта, его удвоенное значение равно диаметру винта DB= 2R. Боковую кромку лопасти, обращенную в сторону вращения гребного винта при переднем ходе судна, называют входящей, противоположную ей кромку - выходящей. Поверхность лопасти, обращенная в корму судна и воспринимающая реакцию отбрасываемой воды при переднем ходе судна, именуют нагнетательной, противоположную ей (обращенную к корпусу судна) - засасывающей поверхностью. Форма лопасти характеризуется ее контуром, который образуется пересечением нагнетающей и засасывающей поверхностей. Число лопастей винта z=2-8 в зависимости от типа судна.
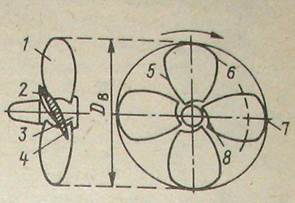
Рис.(1-лопасть;2-засасывающая поверхность;3-ступица;4-нагнетательная поверхность;5-входящая кромка;6-выходящая кромка;7-край лопасти;8-корень лопасти.)
В основе геометрии лопастей гребного винта лежит винтовая поверхность. Рассмотрим, как она образуется.
Возьмем горизонтальный отрезок прямой линии ВВ1 = r будем вращать его равномерно вокруг вертикальной оси 00, одновременно перемещая его вверх с постоянной скоростью (рис. 6.6). В результате такого сложного движения отрезок ВВ1 опишет в пространстве винтовую поверхность. Если теперь вокруг оси 00 построить цилиндрическую поверхность радиусом г, то точка В1 опишет на этой поверхности винтовую линию. Отрезок ВВ1 называют образующей винтовой поверхности, а путь, проходимый любой точкой образующей ВВХ в аксиальном направлении за один полный оборот вокруг оси 00, -геометрическим шагом винтовой линии Нв. Если ВВ1 не доходит до оси 00, то при одновременном поступательном движении она образует винтовую поверхность в виде винтовой ленты. Разрежем цилиндрическую поверхность с прочерченной на ней винтовой линией E1B1D1по вертикальной образующей E1D1и развернем ее на плоскость. Полученная развертка будет иметь вид прямоугольника ACDE, длина основания которого равна длине окружности 2πr, а высота - шагу винтовой линии Hв. Если вращение и подъем образующей ВВ1 происходит с равномерной скоростью, то винтовая линия при этом превратится в гипотенузу ADпрямоугольного треугольника ADE, называемого шаговым треугольником. Угол φ при основании треугольника именуют шаговым углом. Этот угол определяют из соотношения
Отношение шага винтовой поверхности, положенной в основу образования лопасти, к диаметру винта называют шаговым отношением HB/DB.
Рассекая телесную лопасть соосным с винтом цилиндром радиусом г и развертывая контур полученного сечения на плоскость, получаем профиль сечения лопасти на данном радиусе. В зависимости от типа и условий работы винта применяют сегментные, авиационные и клиновидные профили . У сегментных профилей наибольшая толщина приходится на середину хорды профиля, у авиационных она смещена к передней кромке в район трети хорды профиля. Сегментные и авиационные профили могут быть плосковыпуклыми, двояковыпуклыми и выпукло-вогнутыми. В зависимости от направления вращения образующей лопастей гребные винты могут быть правыми и левыми.
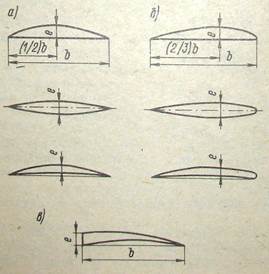
Рис. Профили сечений гребного винта: а — сегментный; b- авиационный; в- клиновидный
Кинематические характеристики гребного винта.
Представим себе, что гребной винт или лопастной элемент винта вращается не в воде, а в твердой среде. Тогда за один оборот он пройдет в аксиальном направлении путь, равный геометрическому шагу. В воде расстояние, проходимое винтом за один полный оборот, будет меньше шага. Путь, проходимый гребным винтом в воде в осевом направлении за время, соответствующее одному обороту, называют поступью гребного винта hp= υр /n. В теории гребных винтов в качестве важнейшей кинематической характеристики используют относительную поступь λp=υp/(DBn). Скорость движения гребного винта в твердой среде в осевом направлении была бы Hвn, скорость этого же движения в воде будет меньше. Разность Нвп-υр именуют скольжением гребного винта S1. Важным кинематическим параметром гребного винта является относительное скольжение
![]()
Величина υр - это скорость движения гребного винта в жидкости в аксиальном направлении, не равная скорости судна относительно воды.
Оба кинематических параметра связаны между собой. Как следует из выражения:
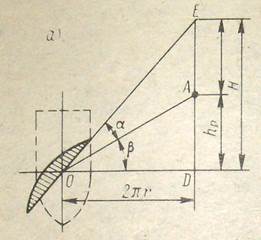
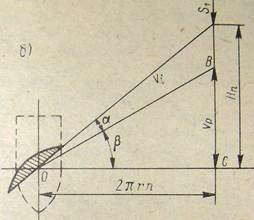
Треугольники пути, пройденного гребным винтом за один оборот (а), и его скоростей (б)
13. Образование упора и момента гребного винта в свободной воде.
Рассмотрим многоугольник скоростей потока, натекающего на кольцевой элемент лопасти винта толщиной dr, образованный сечениями винта двумя соосными с ним цилиндрами радиусами г и r + dr:
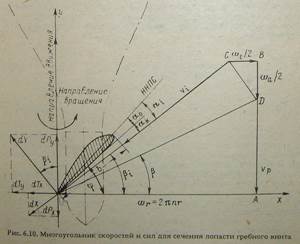
Очевидно, что этот элемент можно рассматривать как элемент крыла, расположенный в потоке жидкости под некоторым углом атаки αi,-. Двумя взаимно перпендикулярными сторонами этого многоугольника являются окружная скорость ωr = 2πrn, обусловленная вращением гребного винта, и осевая скорость υр, вызванная поступательным движением элемента лопасти в жидкости в направлении движения судна.
Угол β = arctg (υp/ωr) называют углом поступи. Поскольку углы АОВ и CDBравны, то угол βi,- определится формулой:
![]()
Этот угол именуют углом индуктивной поступи. Он характеризует режим работы рассматриваемого элемента гребного винта с учетом индуктивных потерь, являющихся следствием появления вызванных скоростей ωа и ωt
Направление вектора результирующей скорости υiи хорды элемента лопасти определяют три угла: угол атаки элемента лопасти αr, кромочный угол αк, угол нулевой подъемной силы α0.
В соответствии с теорией крыла на рассматриваемом элементе лопасти возникнут сила профильного сопротивления dX, направленная вдоль вектора скорости υi, и перпендикулярная к ней подъемная сила dY. Проецируя эти силы на ось Ох, совпадающую с направлением окружной скорости элемента лопасти, и перпендикулярную к ней ось Оу, совпадающую с направлением поступательной скорости винта, получаем соответственно элементарные упор и касательную силу:
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.