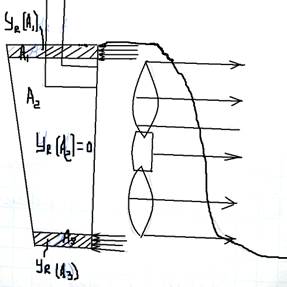
Если точки кривой располагаемой мощности графически перенести в верхнюю часть паспортной диаграммы на соответствующие кривые полезной тяги, то получится кривая 7, называемая кривой предельной располагаемой тяги, которая используется при решении задач о буксировке судном каких-либо объектов, Вычитая из ординат этой кривой ординаты кривой сопротивления судна в соответствующих условиях плавания, можно получить кривую 8 располагаемой тяги на гаке буксира: P6=Pe1 - R.
Паспортная диаграмма позволяет, в частности, решать задачи о средней потере скорости судна в тех или иных условиях плавания; Для этого необходимо сравнить две точки в верхней части паспортной диаграммы на кривой 8 при пересечении ее с кривой 2 и с кривой, соответствующей определенным эксплуатационным условиям, например с одной из кривых 3. Абсциссы этих точек дадут значения интересующих нас скоростей судна в этих условиях.
19. Процесс реверса судна с ВФШ и BPШ.
Реверсивными качествами называют способность судна останавливаться и изменять своё направление движения на противоположное под действием двигательно-движетельного комплекса.
Реверса судна с ВФШ имеет следующие периоды:
1.от момента перекладки рукоядки телеграфа до прекращения подачи топлива в двигателе.
2.от момента прекращения подачи топлива до достижения частоты подачи контр-воздуха.
3.от подачи контр-воздуха до раскрутки двигателя в противоположном направлении.
Во втором периоде частота вращения двигателя и винта происходит под действием сил сопротивления винта и валопровода(процесс может занимать несколько минут и ускорить его невозможно).
После изменения направления вращения в третьем периоде винт переходит в режим обратной струи изолируя руль и взаимодействуя с корпусом судна.
На режиме обратной струи винт изолирует от любого набегающего потока большую часть руля(80-90%). Управляемость судна теряется, изменить траекторию движения невозможно.
Важнейшая задача судоводителя при реверсе знать и учитывать траекторию движения судна.
20. Силы на корпусе и гребном винте при реверсе и на заднем ходу.
Кормовая оконечность корпуса судна представляет собой переход от V-образных шпангоутов в районе дейдвуда к U-образным в районе миделя.
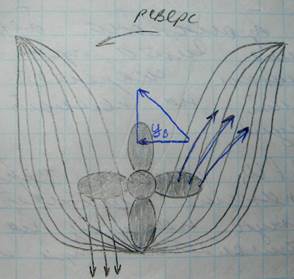
Достигая кормовой оконечности струя гребного винта разделяется пополам, струя одного борта движется вверх, огибая V-образные шпангоуты другая вниз под киль судна.
Струя идущая вверх огибая V-образные шпангоуты передаёт на них гидродинамическую реакцию, которая имеет проекцию на ось у.
Правило изменения курса при реверсе:
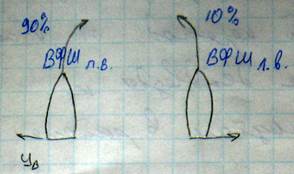
Для ВФШ правого вращения винт при реверсе меняет направление на левое вращение, гидродинамическая реакция на корпусе судна действует в левую сторону и так как это в корме судна меняет свой курс вправо. Для ВФШ левого вращения наоборот.
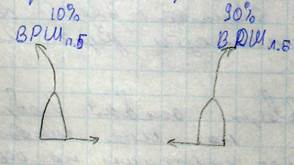
Особенности реверса с ВРШ:
Реверс ВРШ происходит без изменения направления вращения винта, при этом скорость перекладки скоростей с полного переднего на полный задний ход 30-40 секунд.
Судно с ВРШ раньше теряет управляемость, раньше получает гидродинамическую нагрузку на корпус и больше отклоняется при своём режиме.
Правило определения знаков:
21. Виды качки судна. Параметры качки. Амплитудно-частотные
характеристики.
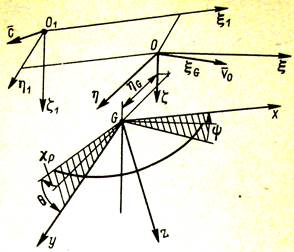
Качка может наблюдаться как в условиях поступательного движения судна с постоянной скоростью, так и при отсутствии хода. С точки зрения теоретической механики качка судна является предметом изучения динамики свободного твердого тела, окруженного жидкостью и находящегося под воздействием морского волнения (или без него). Введем несколько систем координат (рис.). Одна из них Gxyzс началом в ЦТ судна G- подвижная, связанная с судном система, служащая для описания геометрии корпуса судна и распределения масс внутри него. Вторая система координат Оξηζ ~ также подвижная система, но лежащая в плоскости поверхности воды в ее невозмущенном состоянии. Ее вводят для отсчета отклонений судна от положения равновесия. Третья система O1, ξ1, η1, ζ1— неподвижная в пространстве, также лежащая на поверхности воды система, служащая для описания направления движения судна и направления распространения волнения.
Положение судна в каждый момент времени (отклоненное от положения равновесия) описывается шестью независимыми параметрами в соответствии с шестью степенями свободы. Отклонения ЦТ судна -точки G- характеризуются координатами ξG(t),ηG(t),ζG(t) в системе Оξηζ. Повороты судна относительно трех осей дают еще три угла: угол крена 9, угол дифферента ф и угол рыскания Хр- Известная система углов Эйлера для задач качки является неудобной,, поэтому А. Н. Крыловым и С. Н. Благовещенским предложена более удобная корабельная система углов.
судно в исходное положение. Понятия „продольная качка" и „поперечная качка" характеризуют сложное движение сразу вдоль нескольких степеней свободы, причем в первом случае ЦТ судна движется в вертикальной продольной плоскости при одновременной килевой качке [ψ(t)], а во втором случае ЦТ совершает орбитальное движение в поперечной плоскости с одновременным изменением двух координат ηG(t) и ζG(t) и бортовой качкой θ(t).
При том или ином виде качки изменяются не только перечисленные координаты и углы, но появляются переменные во времени линейные и угловые скорости и ускорения. Эти скорости и ускорения называют кинематическими параметрами отдельных видов качки судна. Кроме того, движение произвольной точки судна характеризуется линейной скоростью и ускорением. В образовании этих скоростей и ускорений участвуют те или иные линейные и угловые кинематические параметры.
Линейные и угловые скорости и ускорения в ЦТ судна отыскивают дифференцированием по времени координат и углов как функций времени. Таким образом, одной из главных задач теории качки является нахождение функций, описывающих процессы качки. Эти функции получают в результате решения уравнений качки судна.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.