5.1. Функция «опережающего считывания и расшифровки
кадровУП» (“Look Ahead”)
Траектория движения инструмента по обрабатываемой поверхности представляет собой кусочно-ломанную линию, приближающуюся к теоретическому контуру поверхности с заданной точностью. При сложном контуре длина этих отрезков достаточно мала (несколько десятков микрон), а количество их велико. В обычных системах ЧПУ после окончания движения по какому-либо отрезку этой кусочно-ломанной линии и переходу на следующий отрезок узел станка должен сначала остановиться, чтобы исключить «перебег» конечной точки отрезка, а затем, после считывания информации о перемещении по следующему отрезку, начать новый разгон. Таким образом, станок постоянно работает в режиме разгона-торможения. Это приводит к значительному увеличению машинного времени и, более того, при малой длине отрезка станок не успевает выходить на заданную скорость подачи. В добавление к этим неприятностям, такой режим работы отрицательно влияет на динамику работы привода, значительно сокращая его срок службы. Кратковременные процессы ускорения и торможения являются причиной возникновения собственных колебаний перемещающегося узла, которые могут в большой мере повлиять на качество обрабатываемой поверхности детали, значительно увеличивая её шероховатость. Поэтому нужно, чтобы система могла бы считывать и анализировать информацию о последующей траектории движения относительно отрабатываемого в данный момент отрезка контура и по возможности не снижать (или незначительно снижать) скорость подачи при подходе к концу отрезка. Кроме того, необходимо, чтобы подача рассчитывалась в соответствии с кривизной траектории движения инструмента с учётом удержания величин ускорения и замедления в заданных пределах.
Решить эти проблемы помогает функция «опережающего считывания и расшифровки кадров УП», которая, в процессе отработки текущего кадра, считывает определённое число последующих кадров управляющей программы и анализирует их. Если при переходе на следующий кадр траектория движения инструмента должна сильно измениться, т. е. между соседними участками прямых имеется определённый угол, система, в зависимости от величины этого угла, снижает скорость подачи до определённых пределов. Если переход на последующий участок происходит по касательной, скорость подачи на предыдущем участке не снижается. Число считываемых с опережением кадров задаётся в параметрах системы и может достигать 128 кадров, как в системе TNC фирмы HEIDENHAIN. Таким образом, данная функция позволяет уменьшить машинное время обработки детали, получить более плавное перемещение инструмента относительно детали, повысить качество обрабатываемой поверхности и увеличить срок службы перемещающихся узлов станка.
При считывании и обработке информации кадра важную роль играет скорость, с которой выполняется данный процесс. Особенно это важно высокоскоростной обработке. В большинстве случаев скорость обработки кадра системой составляет 6 мс, в лучшем случае 4 мс, что соответствует скорости подачи равной 7,5 метров в минуту при перемещении в одном кадре 0,5 мм.
5.2. NANOINTERPOLATION – Нано интерполяция, при которой команды по положению, передаваемые на цифровые сервопривода, рассчитываются в нано единицах, то есть с дискретностью тысячных долей микрометра (миллионных долей миллиметра). Это позволяет значительно увеличить точность обработки поверхности за счёт сглаживания скорости перемещения.
5.3. Интерполяция NURBS (Non-Uniform Rational B-Splines – нестандартные, рациональные сплайны В) — один из методов интерполяции по плавным кривым В-типа. Для описания кривых произвольной формы в системах CAD часто используется математика сплайнов, которая также применяется в стандарте STEP (Standard for the Exchange of Product Model Data, ISO/IEC 10303) для обмена данными математических моделей.
Сплайн – это метод описания сложных кривых. Имеется три вида сплайнов:
· A-Spline – проходит точно через заданные точки. Этот тип сплайнов позволяет построить кривые только по 6 смежным точкам. При резком изгибе кривизны невозможно получить плавную кривую. Главная область применения этого типа сплайна – это проход через точки, полученные от измерительной машины или от аналогичных устройств.
· B-Spline – при построении этого типа сплайнов запрограммированные точки являются только контрольными точками для создаваемой кривой. Кривая только прилегает к этим точкам, а не проходит непосредственно через них. Этот тип сплайнов является оптимальным средством для определения рельефных поверхностей и может служить интерфейсом для CAD систем. Создаваемая кривая всегда является касательной к начальной и конечной точкам сплайна. Дополнительные параметры (вес или значение точки - PW), задаваемые в кадре, оказывают влияние на создаваемую кривую. Они могут быть запрограммированы для каждой интерполяционной точки в виде PW = n, где n может изменяться от 0 до 3 с шагом 0,0001. При n больше 1, кривая сильнее притягивается к контрольной точке, при n меньше 1, кривая притягивается к контрольной точке слабее.
· С-Spline - это кубический сплайн, представляющий собою непрерывную кривую, проходящую через все заданные точки. Можно использовать эти сплайны для задания точек, расположенных вдоль аналитически вычисленной кривой. В процессе работы они используют полиномы 3-его порядка, например, параболы, гиперболы, эллипсы.
В обычных системах ЧПУ при расчёте траектории движения инструмента для последующей механообработки информация, полученная от систем CAD, не может быть непосредственно использована в формате плавной линии, так как в системах ЧПУ она представляется в виде последовательности коротких линейных перемещений. Это создаёт некоторые отрицательные моменты в плане увеличения времени обработки, ухудшения динамики работы станка, качества обрабатываемой поверхности.
Некоторые системы ЧПУ могут самостоятельно интерполировать движения по осям с помощью математических кривых, используя технику NURBS. В этом случае один кадр управляющей программы, описывающий сплайн, может заменить до 10 кадров, описывающих отрезки, при сохранении точности (Рис. 5.1). Интерполяция по кривым позволяет менять направление движения постепенно, что позволяет системе управления поддерживать более высокую среднюю рабочую подачу, чем при перемещении по полигональной траектории.
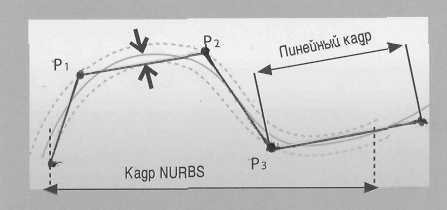
Рис. 5.1. Интерполяция контура детали по технике NURBS
Таким образом, техника NURBS по сравнению с линейной интерполяцией имеет следующие преимущества:
· Исключает прерывистый характер перемещения, который приводит к вибрациям и дополнительному износу узлов станка и инструмента.
· Улучшает качество обрабатываемой поверхности, исключая огранку и необходимость введения дополнительной операции ручной доводки.
· Сокращает общее время обработки и повышает производительность оборудования за счёт сокращения времени на разгон и торможение на каждом линейном участке и поддержания более высокой средней скорости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.