
















Санкт – Петербургский Институт Точной Механики и Оптики
(Технический Университет)
Кафедра Систем Управления и Информатики
по курсу Роботехнические системы и комплексы
Выполнила:
Группа: 545
Преподаватель:
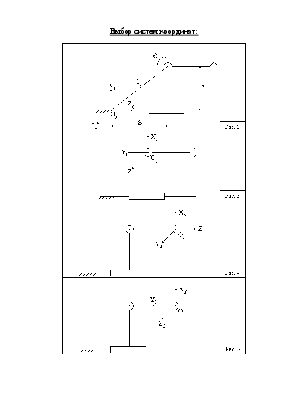
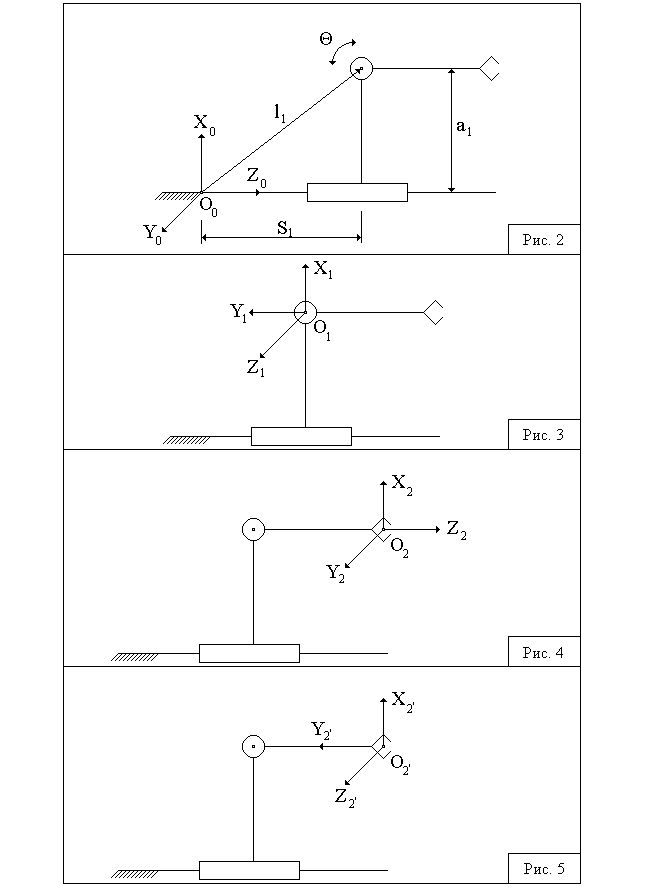
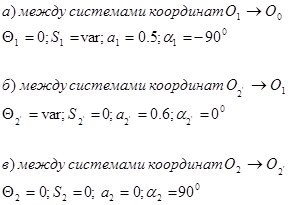
Задание:
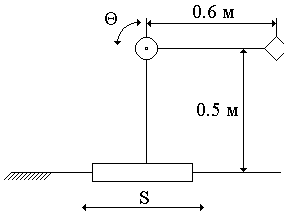
Рис. 1
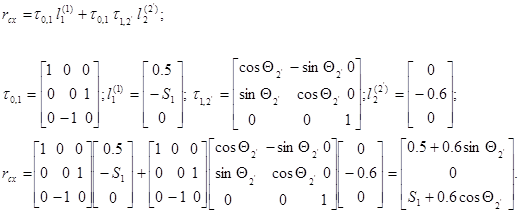
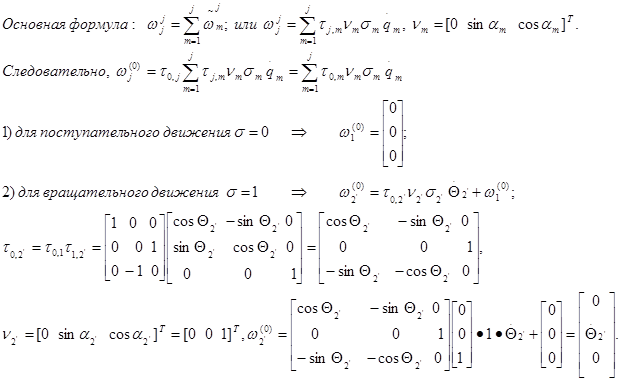
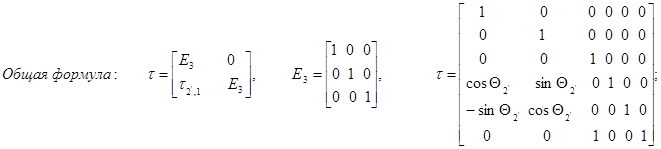
Формулы перехода:
Вычисления:
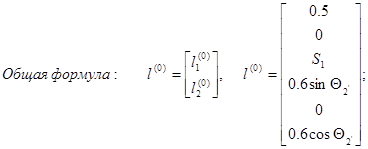
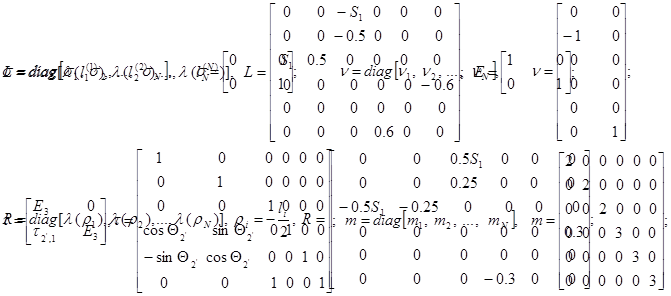
Вычисление rсх:
 |
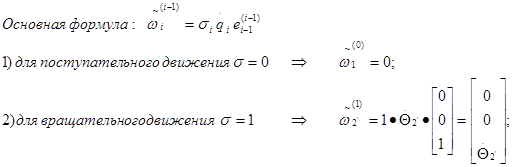
Вычисление относительной угловой скорости:
 |
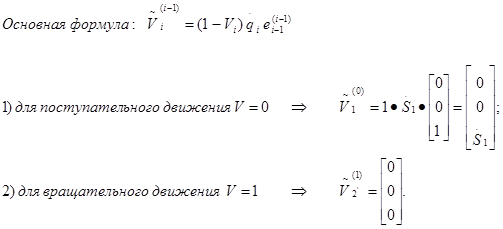
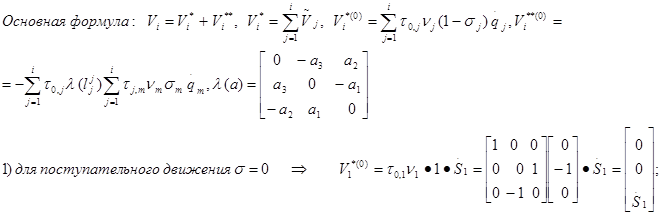
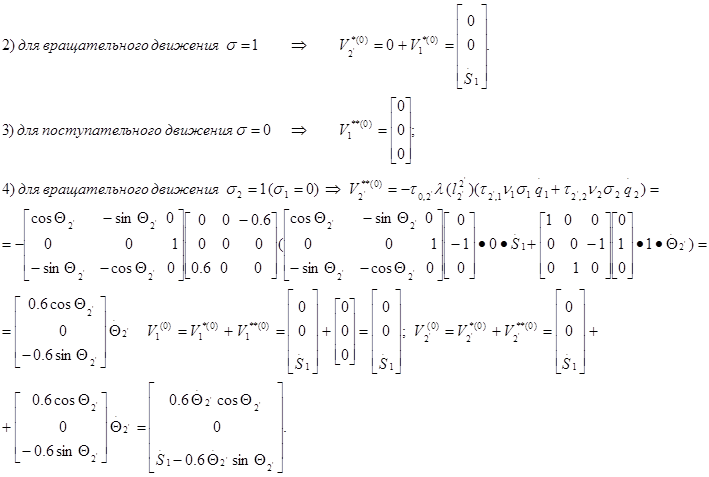
Вычисление относительной линейной скорости:
Вычисление абсолютной угловой скорости:
Вычисление абсолютной линейной
скорости:
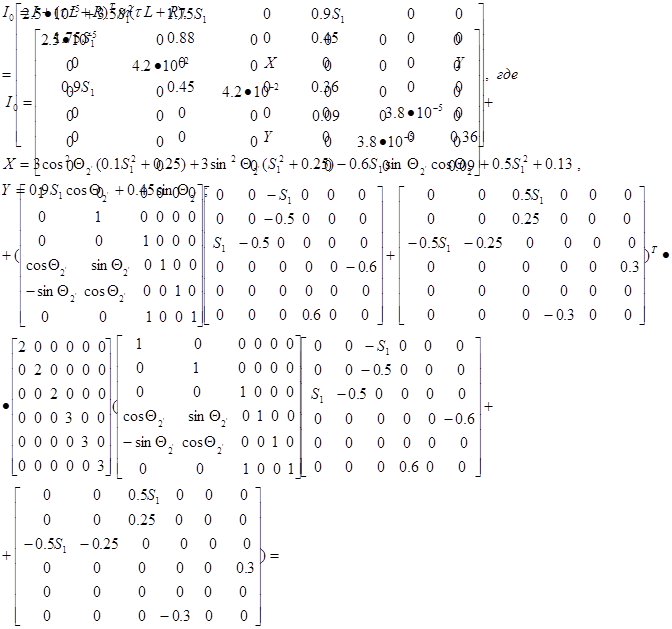
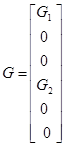
Построение блочных матриц:

Вычисление матриц A(q) и D(q):
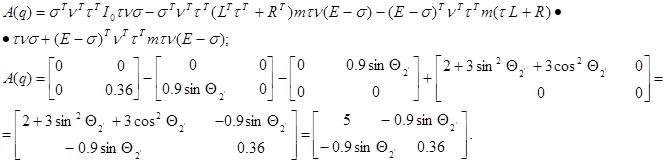
Вычисление матрицы A(q):
 |
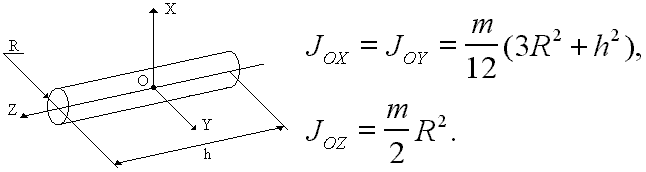
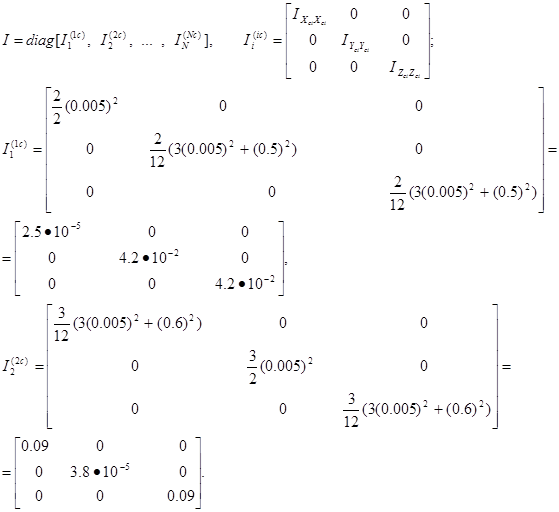
Расчет моментов инерции цельного стержня (m1= 2 кг, m2= 3 кг, h1= 0.5 м, h2= 0.6 м, R= 0.005 м)
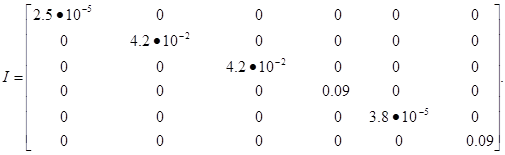
 |
Расчет матрицы A(q):
Вычисление матрицы D(q):
 |
Построение математической модели:
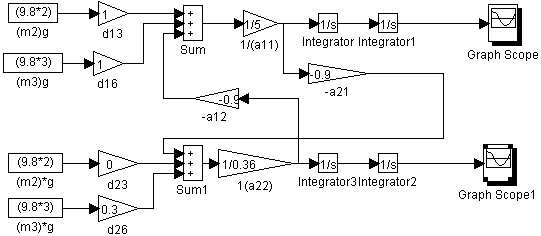
Рис. 1. Математическая модель нескорректированной системы.
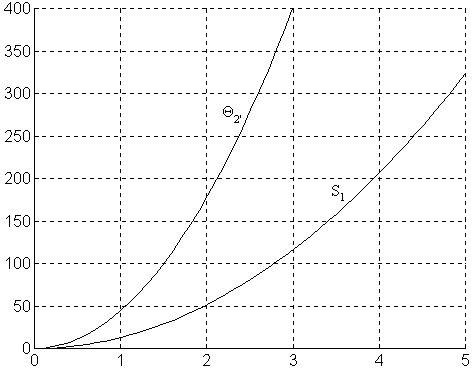
Рис. 2. Результаты моделирования.
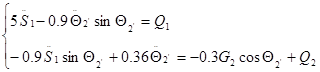
Вычисление максимальных значений моментов:
а11(max) = 5; а12(max) = а21(max) = (Θ2’ = 900) = -0.9; а22 = 0.36; d13 = d16 = 1; d23 = 0;
d26(max) = (Θ2’ = 900) = 0.3
Выбор двигателя:
Выбираем двигатель постоянного тока ДПР-72-H1-03, технические данные которого приведены в Таблице1.
|
Показатель |
Значение |
|
Номинальный момент, м×Н×м |
392,9 |
|
Номинальная мощность, Вт |
19.23 |
|
Номинальное напряжение, В |
27 |
|
Номинальная частота вращения, об/мин |
4500 |
Частота вращения холостого хода, об/мин |
5000 |
Номинальный пусковой момент, м×Н×м |
306,1 |
|
Потребляемый ток при номинальном моменте, А |
1,0 |
|
Момент инерции ротора 10-4 кг×м2 |
0,60 |
|
Масса, кг |
0,60 |
Таблица1. Технические данные двигателя ДПР-72-H1-03.
По расчетам,
оптимальное передаточное число редуктора i = 1. Суммарный момент инерции ![]() ; JДВ=0.6*10-4Нм2;
; JДВ=0.6*10-4Нм2;
 =0.041;
=0.041;
![]() =0,052;
RЯ = 2.9Ом.
=0,052;
RЯ = 2.9Ом.
Построение и моделирование математических моделей каналов:
1. Для первого канала применим пропорционально-интегральный регулятор:
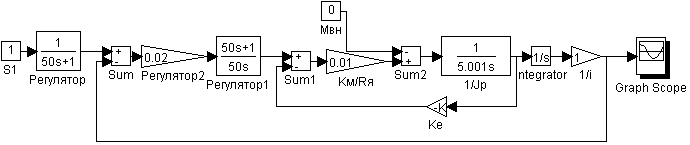
Рис. 3.
Схема моделирования первого канала системы с пропорционально-интегральным регулятором
без возмущающего воздействия (MВН = 0); ![]() , Крег
= 0.02.
, Крег
= 0.02.
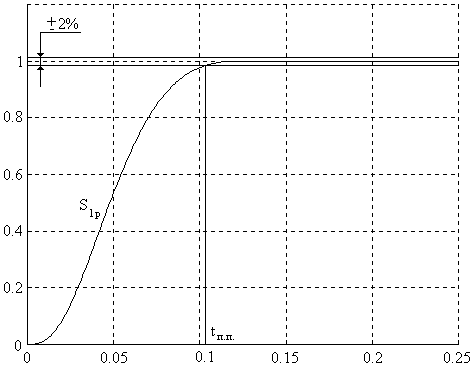
Рис. 4. Результаты моделирования по первому каналу: перерегулирование σ = 0%, tп.п. = 0.105 с.
2. Для второго канала также применим пропорционально-интегральный регулятор:
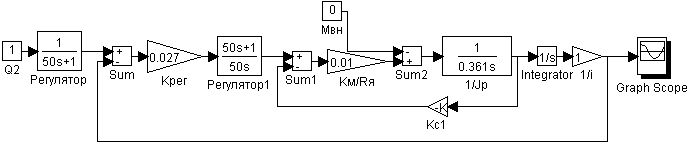
Рис. 5.
Схема моделирования второго канала системы с пропорционально-интегральным регулятором
без возмущающего воздействия (MВН = 0); ![]() , Крег
= 0.027.
, Крег
= 0.027.
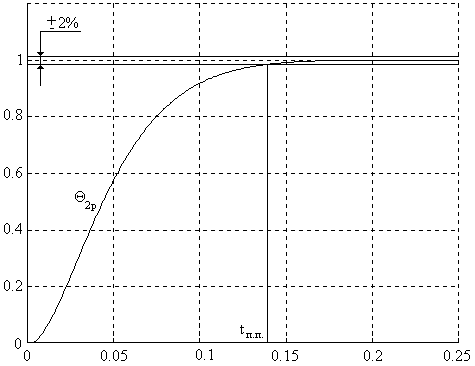
Рис. 6. Результаты моделирования по второму каналу: перерегулирование σ = 0%, tп.п. = 0.135 с.
3. Проделаем те же эксперименты, но с возмущающим воздействием:
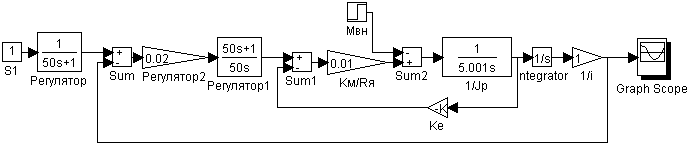
Рис. 7. Схема моделирования первого канала без комбинированного регулятора по возмущению.
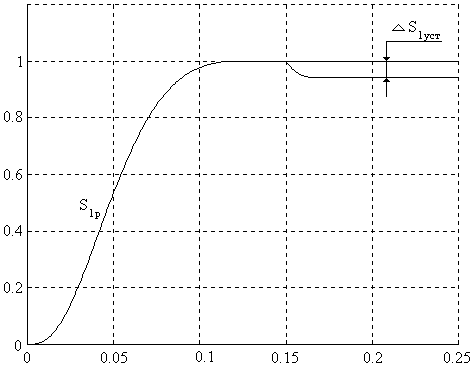
Рис. 8.
Результаты моделирования: установившаяся ошибка ![]()
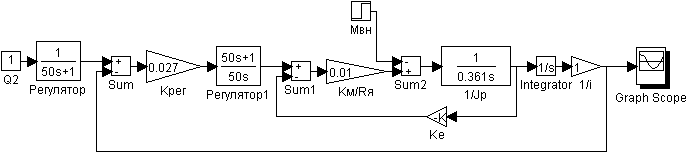
Рис. 9. Схема моделирования второго канала без комбинированного регулятора по возмущению.
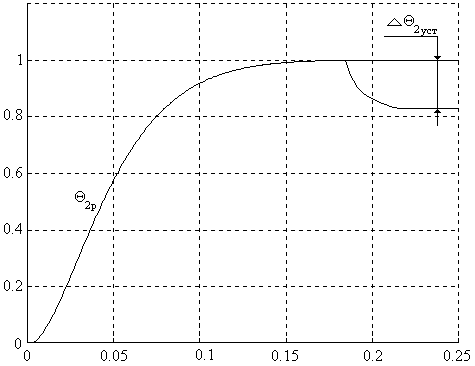
Рис.
10. Результаты моделирования: установившаяся ошибка ![]()
4. Проверим астатизм системы.
1) Отработка линейно-нарастающего воздействия:
а) для первого канала:
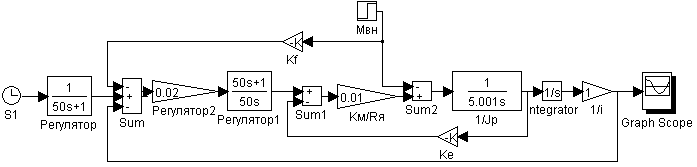
Рис. 11. Схема моделирования отработки линейно-нарастающего воздействия первым каналом с комбинированным регулятором по возмущающему воздействию.
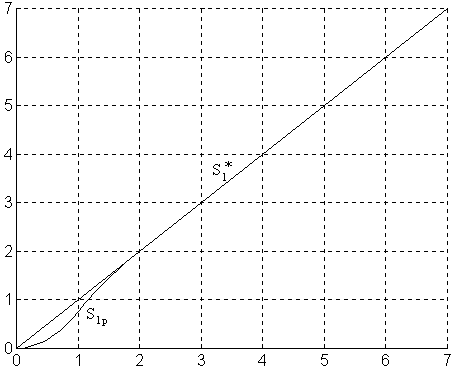
Рис. 12. Результаты моделирования: установившаяся ошибка ΔSуст = 0.
б) для второго канала:
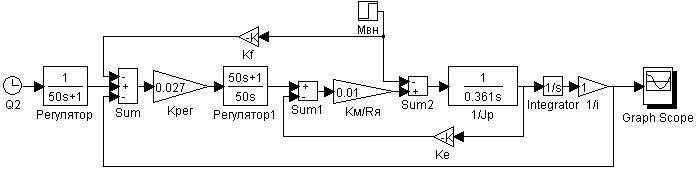
Рис. 13. Схема моделирования отработки линейно-нарастающего воздействия вторым каналом с комбинированным регулятором по возмущающему воздействию.
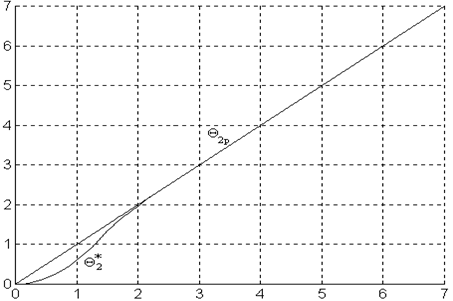
Рис. 14. Результаты моделирования: установившаяся ошибка ΔΘуст = 0.
2) Отработка нелинейного входного воздействия:
а) для первого канала:
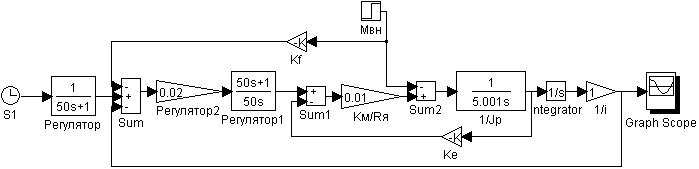
Рис. 15. Схема моделирования отработки нелинейного входного воздействия первым каналом с компенсацией задающего и возмущающего воздействий.
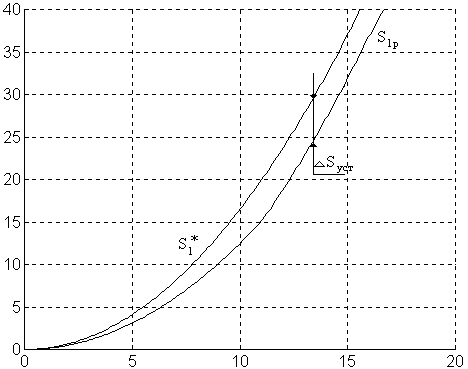
Рис. 16. Результаты моделирования: установившаяся ошибка ΔSуст = 5.
б) для второго канала:
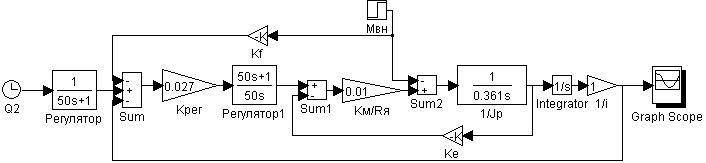
Рис. 17. Схема моделирования отработки нелинейного входного воздействия вторым каналом с компенсацией задающего и возмущающего воздействий.
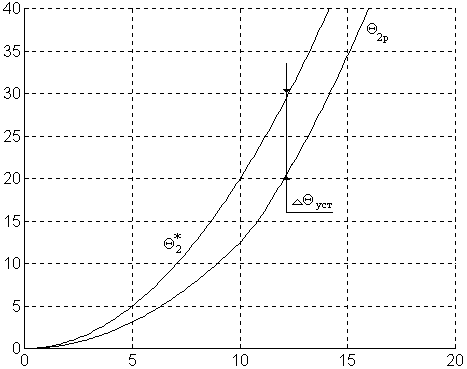
Рис. 18. Результаты моделирования: установившаяся ошибка ΔΘуст = 10.
Вывод: результаты моделирования первого и второго каналов при отработке линейных входных воздействий (константы и линейно-нарастающего) показывают, что система имеет порядок астатизма по отношению ко входному воздействию не ниже первого; отработка нелинейного воздействия – с ненулевой постоянной ошибкой при компенсации и возмущающего, и задающего воздействия – позволяет предположить, что порядок астатизма системы не выше второго.
Общий вывод – система имеет порядок астатизма по отношению ко входному воздействию, равный двум (υ=2).
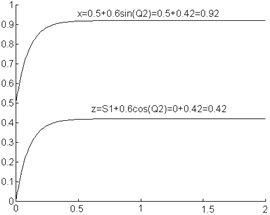
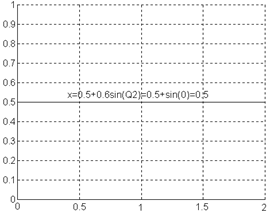
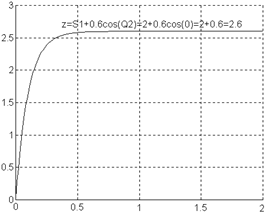
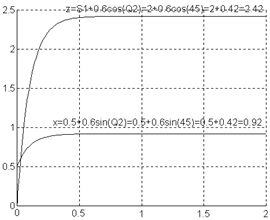
Моделирование решения прямой задачи кинематики:
|
Рис. 19. Схема моделирования решения прямой задачи кинематики для всей системы |
Рис. 20. S1=0м, Θ2’=450 |
|
|
|
|
Рис. 21 S1=2м, Θ2’=00 |
|
|
Рис. 22 S1=2м, Θ2’=450 |
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.