ГЛАВА 2
МОДЕЛИ ЛИНЕЙНЫХ ОБЪЕКТОВ В ЗАДАЧАХ ИДЕНТИФИКАЦИИ
2.1. Общая структура линейных моделей с помехой
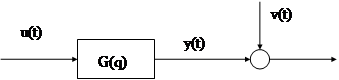
Рассмотрим множество моделей линейных стационарных объектов с дискретным временем, с учетом неконтролируемых воздействий. Все неконтролируемые сигналы в этом случае принято сводить к аддитивной помехе, приложенной к выходному сигналу системы (Рис.2.1.1), то есть
|
Рис.2.1.1
![]() (2.1.1)
(2.1.1)
Здесь
G(q)=B(q)/A(q) - дискретная передаточная функция системы;
u(t) - входной сигнал;
v(t) - стационарная случайная последовательность помехи;
z(t) - выходной сигнал;
qx(t)=x(t+1) - оператор сдвига вперед;
t=0, 1, 2, ... - дискретное время.
Последовательность v(t)
имеет дробно-рациональную спектральную плотность, поэтому может быть
представлена дискретным белым шумом n(t) ~![]() с нулевым средним и дисперсией
с нулевым средним и дисперсией ![]() , проходящим через линейную стационарную систему с
весовой функцией h(k):
, проходящим через линейную стационарную систему с
весовой функцией h(k):
 (2.1.2)
(2.1.2)
Из выражения (2.1.2) получим
 , где Е - символ математического ожидания
, где Е - символ математического ожидания
 (2.1.3)
(2.1.3)
ковариационная функция сигнала помехи, так как
![]() , где
, где ![]() - дискретная функция Дирака.
- дискретная функция Дирака.
Вводя в рассмотрение оперативную передаточную функцию
 (2.1.4)
(2.1.4)
выражение (2.1.2) записывается в оперативной форме
![]() (2.1.5)
(2.1.5)
где H(q)=C(q)/D(q) - операторная передаточная функция,
n(t) ~![]() - дискретный белый шум.
- дискретный белый шум.
Применяя к обеим частям соотношения (2.1.3) z - преобразование, получим выражение для спектральной плотности помехи
![]() (2.1.6)
(2.1.6)
Если белый шум n(t) имеет единичную
интенсивность ![]() , то будем иметь
, то будем иметь
![]() (2.1.7)
(2.1.7)
откуда следует, что для любой
дробно-рациональной спектральной плотности ![]() возможно единственное разложение (2.1.7), называемое факторизацией
спектральной плотности: H(z) - передаточная функция формирующего фильтра,
имеющее шум и полосы внутри единичного круга, т.е. отвечает устойчивой,
минимально-фазовой системе.
возможно единственное разложение (2.1.7), называемое факторизацией
спектральной плотности: H(z) - передаточная функция формирующего фильтра,
имеющее шум и полосы внутри единичного круга, т.е. отвечает устойчивой,
минимально-фазовой системе.
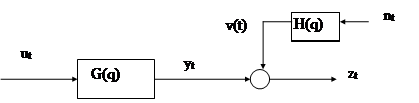
С учетом выражения (2.1.5) соотношение “вход - выход” модели принимает вид:
![]() (2.1.8)
(2.1.8)
где G(q)=B(q)/A(q); H(q)=C(q)/D(q) - дискретные операторные передаточные функции по входу и помехе соответственно;
u~![]() - входная последовательность с нулевым средним и
ковариационной функцией
- входная последовательность с нулевым средним и
ковариационной функцией ![]() .
.
n ~![]() - дискретный белый шум с нулевым средним и
дисперсией
- дискретный белый шум с нулевым средним и
дисперсией ![]() .
.
Структурная схема отвечающая (2.1.8) изображена на рис.2.1.2.
|
Рис.2.1.2
2.2 Частные структуры линейных моделей с помехой
Пусть в выражении (2.1.8)
![]() ;
;
![]() , тогда можно записать уравнение объекта в
операторной форме
, тогда можно записать уравнение объекта в
операторной форме
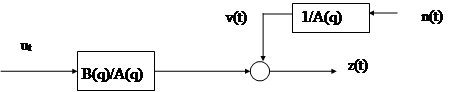
![]() (2.2.1)
(2.2.1)
где A(q)=1+a1q-1+...+anq-n - характеристический многочлен;
B(q)=b1q-1+...+bmq-m - многочлен по входному воздействию;
C(q)=c0+c1q-1+...+cpq-p - многочлен по возмущению (помехе).
Структурное представление (2.2.1) изображено на рис.2.2.1.
|
Рис.2.2.1
Модель, описываемая уравнением (2.2.1), называется моделью авторегрессии скользящего среднего (АРСС).
Рассмотрим частные случаи моделей, отличающиеся характером формирования сигнала помехи V(t).
1. Модель ошибки уравнения
Положим в уравнении C(q)=1, тогда
![]()
и уравнение (2.2.1) принимает вид
![]() (2.2.2)
(2.2.2)
или в развернутом виде
![]() (2.2.3)
(2.2.3)
Уравнение (2.2.3) является одним из самых простых и доступных для практических исследований, так как белый шум n(t) выходит в (2.2.2) как непосредственная ошибка уравнения
![]() , то модель (2.2.2) называют моделью ошибки
уравнения.
, то модель (2.2.2) называют моделью ошибки
уравнения.
Структура модели изображена на рис.2.2.2
.
|
Рис.2.2.2
2. Модель выходной ошибки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.