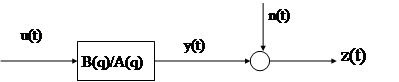
Соответствует случаю приложения помехи n(t) к выходу объекта (Рис.2.2.3).
|
Рис.2.2.3
В этом случае уравнение объекта принимает вид:

Откуда непосредственно записывается уравнение относительно выхода
![]() (2.2.4)
(2.2.4)
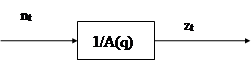
3. Модель авторегрессии (АР-модель)
Получаются из общего уравнения (2.2.1), если положить
![]() ,
,
![]()
![]() (2.2.5)
(2.2.5)
или
![]() (2.2.6)
(2.2.6)
|
Рис.2.6
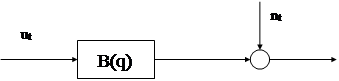
4. Модель скользящего среднего (СС-модель) или регрессионная.
Полагая в (2.2.1)
![]() ,
,
C(q)=1,
Получим
![]() ,
,
![]()
(Рис.2.1.7)
и следовательно
![]() (2.2.7)
(2.2.7)
![]() (2.2.8)
(2.2.8)
|
Рис.2.2.5
Уравнение (2.2.8) соответствует как динамическому объекту с конечным временем переходного процесса, так и многомерному статическому объекту (Рис.2.2.6)
 (2.2.9)
(2.2.9)
|
Рис.2.8
2.3 Описание линейных объектов в виде линейной регрессии
Уравнение вход-выход (2.1.7) в отсутствие помехи принимает вид:
![]() (2.3.1)
(2.3.1)
Введем в рассмотрение вектор ![]() параметров объекта
параметров объекта
![]()
и регрессионный вектор, составленный из входной и выходной последовательностей
![]()
Тогда уравнение (2.3.1) можно переписать в следующем виде
![]() (2.3.1)
(2.3.1)
Выражение (2.3.1) известно в прикладной статистике как линейная регрессия.
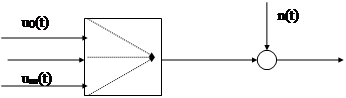
2.4 Модели синтезаторов динамических характеристик линейных объектов
При отсутствии априорных данных о
математической модели линейного идентифицируемого объекта, приходится
использовать аппроксимацию динамических характеристик. Модель объекта в общей
схеме идентификации (Рис.1.6) строится в этом случае, в виде синтезатора
динамических характеристик, который представляет собой систему ортогональных
функций, по которой раскладывается неизвестная весовая функция. Функции
ортогональной системы реализуются в виде совокупности линейных фильтров. В
итоге синтезаторы состоят из динамических элементов (фильтров) с весовыми
функциями ![]() и настраиваемых коэффициентов
и настраиваемых коэффициентов ![]() .
.
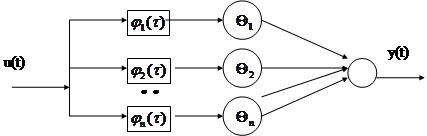
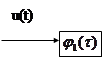
Структура синтезаторов может быть параллельной (Рис.2.4.1) и последовательной (Рис.2.4.2).
|
Рис.2.4.1
|
||||||||||||||||||
Рис.2.4.2
Передаточная функция синтезатора параллельной структуры равна
 , (2.4.1)
, (2.4.1)
где  - передаточные функции фильтров
- передаточные функции фильтров
Для синтезаторов параллельной структуры имеем
 , где
, где
 (2.4.2)
(2.4.2)
Часто используются синтезаторы на функциях Лагерра: полиномы Лагерра определяются в виде
![]()
и ортогоналы с весом
![]() .
.
Если ортогонализовать полиномы Лагерра с весом
![]() , то получим функции Лагерра, преобразование по
Лапласу которых имеет вид, особенно удобный в реализации:
, то получим функции Лагерра, преобразование по
Лапласу которых имеет вид, особенно удобный в реализации:
 (2.4.3)
(2.4.3)
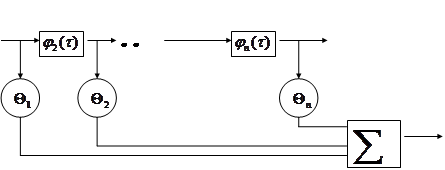
Синтезатор Лагерра последовательной структуры изображен на рис.2.4.3.
|
Рис.2.4.3
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.