4. Динамические системы
1
4. Динамические системы
4.1. Уравнение свертки.
4.2. Идентификация объекта.
4.3. Фурье-преобразование некоторых функции.
4.7. Равенство Парсеваля.
4.8. Применение равенства Парсеваля.
4.9. Энергия гармонического осциллятора.
4.10. Интерполяция рядами Фурье.
4.11. Приложения преобразования Фурье.
4.12. Таблица преобразования Фурье.
2
4.1. Уравнение свертки
-
Понятие динамической системы происходит из классической механики. Это системы, описывающие поведение множества материальных точек в зависимости от времени с помощью конечного набора числовых параметров, которые удовлетворяют системе дифференциальных уравнений первого порядка. Для целей данного курса достаточно считать, что динамическая система – это система, описываемая конечным набором входных и выходных параметров, которые определены на некотором интервале времени.
-
Простейшая динамическая система имеет один входным и один выходным параметр и состоит из одного элемента, будем называть такую упрощенную систему объектом.
3
4.1. Уравнение свертки
-
Параметры представляют собой функции от времени, обозначим входной параметр как функцию x(t) , а выход-ной как y(t). Мы рассматриваем поведение объекта на некотором интервале времени, то есть параметры представляют собой функции от времени на этом интерва-ле. В первой части нашего курса все параметры объекта и все функции будем считать детерминированными. Выходной параметр y(t) некоторым образом зависит от входного параметра, то есть от функции x(t).
-
Мы рассматриваем поведение объекта на некотором интервале времени, то есть параметры представляют собой функции от времени на этом интервале. Зависимость выходного параметра от входного будем записывать в виде соотношения
4
4.1. Уравнение свертки
-
y(t) = F[x(t)],
-
где F – некоторое преобразование функции x(t) в функцию y(t).
-
Преобразование F называется оператором. Например, F может выражать зависимость в виде решения дифференциального уравнения. Одним из простейших видов зависимости функций является уравнение свертки
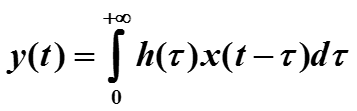
Функция h(t) называется ядром свертки. Свертка широко применяется в теории сигналов, в частности, для моделирования фильтров.
5
4.1. Уравнение свертки
-
В реальной ситуации ядро обычно не равно нулю только на некотором отрезке [0, M], поэтому свертка принимает вид
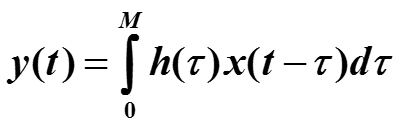
Если бы нижняя граница интервала интегрирования была бы меньше 0, например, -1, то получалось бы, что функция y(t) зависит от значения функции x(0-(-1)) в момент времени от + 1, то есть в будущем, что считаем невозможным.
6
4.1. Уравнение свертки
-
Следовательно, при t < 0 ядро h(t) = 0.
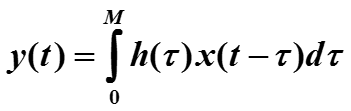
(1)
Для каждого момента времени t0 функция y(t0) зависит от функции x(t) во все моменты времени от t0 – M до t0, то есть, от «недалекого прошлого».
M называется интервалом памяти объекта.
Сокращенно соотношение (1) записывается в виде
y(t) = h(t)*x(t).
7
4.2. Идентификация объекта
-
Одной из основных задач в динамических системах является задача идентификации системы.
-
Предполагается, что исследователь может подать на вход объекта любой сигнал x(t) и наблюдать на выходе получающийся сигнал y(t).
-
Идентификацией системы с параметрами x(t) и y(t) называется построение оператора F, такого, что
-
y(t) = F[x(t)].
-
Процесс идентификация состоит из двух этапов:
-
1) выбор математической модели системы;
-
2) оценивание параметров выбранной модели.
-
В этой модели x(t) выбирает исследователь, и он наблюдает сигнал y(t) на выходе. Таким образом, требуется подобрать такой входной сигнал, чтобы найти неизвестный параметр модели - функцию h(t).
8
4.2. Идентификация объекта
-
Пример решения задачи идентификации.
-
Пусть имеется черный ящик, в который входит сигнал x(t) и выходит сигнал y(t) .
-
1) выбор математической модели системы;
-
В простейшем случае выбирается модель в виде уравнения свертки, но может выбираться и другая модель. Для идентификации черного ящика, работа которого моделируется уравнением свертки (И ТОЛЬКО ДЛЯ ЭТОЙ МОДЕЛИ ! ) задача идентификации решается при помощи свойства фильтрации -функции.
-
2) оценивание параметров выбранной модели.
-
Для уравнения свертки требуется подобрать такой входной сигнал, чтобы найти неизвестный параметр модели - функцию h(t).
9
4.2. Идентификация объекта
-
В качестве входного сигнала возьмем -функцию и для вычисления значения ядра h(t) на отрезке t € [0, M], используем свойство 1 -функции
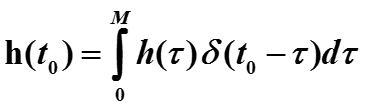
Так можно построить значение ядра в произвольной заданной точке.
Так просто решается задача идентификации для модели в виде уравнения свертки.

10
4.3. Фурье-преобразование некоторых функции
-
Как было показано в п.3.8., преобразование Фурье δ–функции равно постоянной
-
Ясно, что обратное преобразование Фурье от единицы равно δ–функции, а обратное преобразование Фурье от постоянной функции F(z) = c равно δ–функции с коэффициентом c .

4.3. Фурье-преобразование некоторых функции
-
Нам понадобится преобразование Фурье от экспоненты в мнимой степени