невысокие требования к точности расположения деталей передачи;
· предохранение от перегрузки за счет возможности проскальзывания ремня по шкиву.
Наряду с достоинствами ременные передачи обладают и некоторыми существенными недостатками. Это:
· большие габариты;
· непостоянство передаточного числа из-за проскальзывания ремня по шкиву;
· большая нагрузка на валы и опоры;
· низкая долговечность ремней.
Передаваемая мощность – обычно не более 50 кВт, передаточное число – до 6.
Во всех отраслях машиностроения и приборостроения наиболее широкое применение нашли зубчатые передачи благодаря ряду их достоинств:
· постоянству передаточного числа;
· отсутствию проскальзывания;
· большой несущей способности при сравнительно малых габаритах и массе;
· большой долговечности; работе в обширном диапазоне режимов нагружения;
· сравнительно малым нагрузкам на валы и опоры;
· высокому КПД, простоте обслуживания и ухода;
К недостаткам зубчатых передач можно отнести:
· высокие требования к точности изготовления колес и сборки передач;
· необходимость повышенной жесткости корпусов, валов, опор;
· шум, особенно при высоких частотах вращения и недостаточной точности; вибрации;
· имеет низкую демпфирующую способность.
1.1 Определим мощность на рабочем валу привода
![]() , (1.1)
, (1.1)
где Ft – окружное усилие,
υ – скорость конвейера,
![]() кВт,
кВт,
1.2 Определим общий кпд привода.
![]() , (1.2)
, (1.2)
где ![]() - кпд
закрытой зубчатой цилиндрической передачи 0,98
- кпд
закрытой зубчатой цилиндрической передачи 0,98
![]() -кпд
муфты 0,98,
-кпд
муфты 0,98,
![]() - кпд цепной
ременной передачи, 0,96,
- кпд цепной
ременной передачи, 0,96,
![]() - кпд подшипников
качения, 0,99,
- кпд подшипников
качения, 0,99,
![]()
1.3 Определим мощность электродвигателя.
 , (1.3)
, (1.3)
![]() кВт.
кВт.
Ориентировочная частота входного вала при ориентировочных передаточных числах:
![]()
![]() мин-1
мин-1
Фактическую частоту вращения входного вала привода в соответствии с Pэ = 2,2 кВт (Приложение А) принимаем:
![]() мин-1
мин-1
Электродвигатель выбираем
по каталогу (приложение 1[1]) из условия, что Nэл. дв ≥Nтр и ![]() . Тогда
выбираем тип электродвигателя АИР 90L4 ТУ 16-525. 564-84 с асинхронной частотой вращения n = 1395 мин-1.
. Тогда
выбираем тип электродвигателя АИР 90L4 ТУ 16-525. 564-84 с асинхронной частотой вращения n = 1395 мин-1.
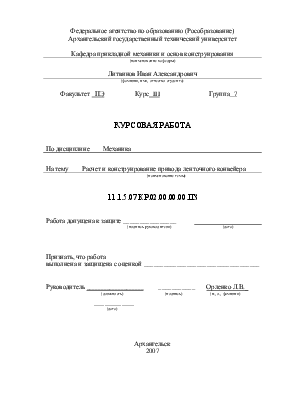
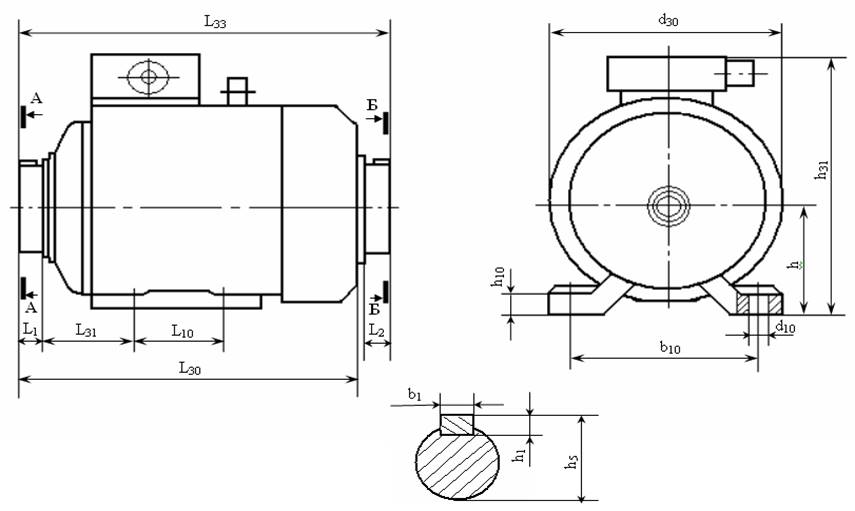
Из приложения 2[1] выберем размеры электродвигателя АИР 90L4 и занесём в таблицу 1. 1
Размеры электродвигателя.
Таблица 1.1
|
Тип электродвигателя |
Число полюсов |
Основные размеры, мм |
||||||||||||
|
l1 |
l10 |
l30 |
l31 |
d1 |
d10 |
d30 |
b1 |
b10 |
h |
h1 |
h10 |
h31 |
||
|
АИР 90L4 |
2 |
50 |
125 |
337 |
56 |
14 |
10 |
210 |
8 |
140 |
90 |
7 |
11 |
225 |
По данным таблицы 1.1 построим эскиз электродвигателя.
|
![]()
|
|
|
|
|
|
|
|
|
1.4 Определим общее передаточное число привода
![]() , (1.4)
, (1.4)
где n1 – частота вращения электродвигателя,
nр.в. – частота вращения рабочего вала,
![]() (1.5)
(1.5)
![]()
![]() .
.
1.5 Произведём разбивку общего передаточного числа по ступеням отдельных передач.
Зададим передаточное число редуктора uр=4, тогда
 , (1.6)
, (1.6)
где uрем - передаточное число ременной передачи,
uр – передаточное число редуктора,
![]() .
.
1.6 Определим частоту вращения последовательно на каждом валу.
![]() мин-1,
мин-1,
![]() , (1.7)
, (1.7)
![]() мин-1,
мин-1,
![]() , (1.8)
, (1.8)
![]() мин-1.
мин-1.
1.7 Определим угловые скорости на валах.
![]() , (1.9)
, (1.9)
![]() рад/сек,
рад/сек,
![]() рад/сек,
рад/сек,
![]() рад/сек.
рад/сек.
1.8 Определим расчётные мощности на валах
![]() кВт,
кВт,
![]() , (1.10)
, (1.10)
![]() кВт,
кВт,
![]() , (1.11)
, (1.11)
![]() кВт.
кВт.
1.9 Определим крутящие моменты
![]() , (1.12)
, (1.12)
![]() Н∙м,
Н∙м,
![]() Н∙м,
Н∙м,
![]() Н∙м.
Н∙м.
1.3 Выбираем стандартный редуктор
Редуктор 1 ЦУ-200-4 12 ТУ 2-056-243-86
Подбор редуктора производим исходя из:
А) По передаточному числу
Б) По номинальному вращательному моменту на тихоходном валу
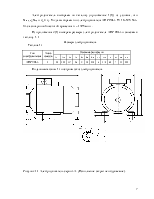
Габаритные и присоединительные размеры
Таблица 1.2
|
|
L |
|
|
|
|
|
H |
|
h |
A |
|
B |
|
d |
|
200 |
580 |
500 |
236 |
165 |
230 |
265 |
425 |
212 |
36 |
437 |
136 |
212 |
200 |
24 |
Таблица 1.3
|
Выходной вал |
Входной вал |
||||||||||
|
d |
|
|
|
b |
t |
d |
|
|
|
d |
t |
|
70 |
|
140 |
105 |
18 |
36,38 |
55 |
|
110 |
82 |
14 |
28,95 |
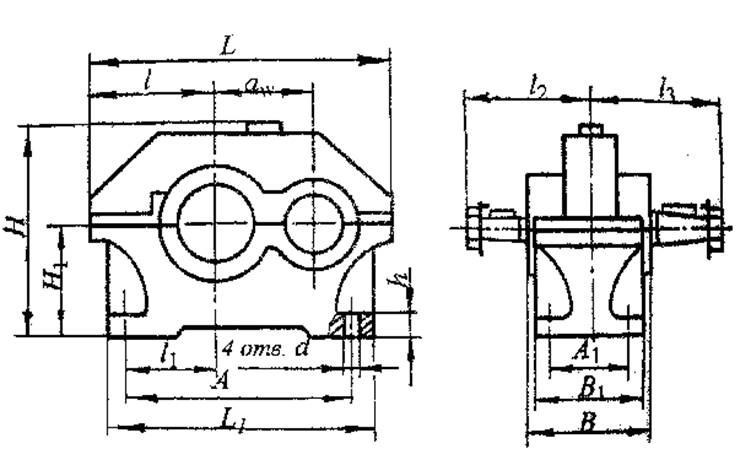
Рисунок 1.2 – Габаритные и присоединительные размеры редуктора
2 РАСЧЕТ И КОНСТРУИРОВАНИЕ КЛИНОРЕМЕННОЙ ПЕРЕДАЧИ
2.1 Расчёт клиноременной передачи
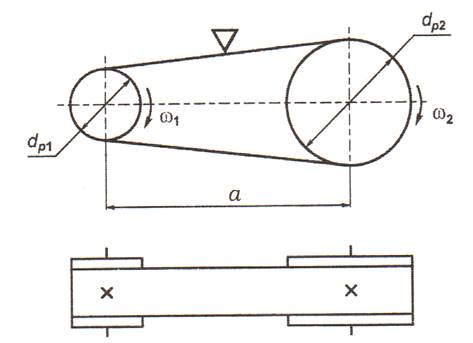
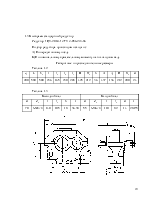
Рисунок 2.1- Эскиз клиноременной передачи
Исходные данные: Р1 = 1,69 кВт; Р2 = 1,6 кВт; Т1 = 11,57 Н∙м; Т2 = 36,7 Н∙м
Сечение клинового ремня
По номограмме 1.5 [2] с учетом мощности Р1 = 1,69 кВт и частоте вращения малого шкива n1 = 1395 мин-1 выбираю тип ремня А.
Расчётная передаваемая мощность
Рр = Р1 ∙ Ср (2.1)
где Ср – коэффициент динамической нагрузки и режима работы, определяется по таблице 1.6 [2]
Ср = 1,4
Рр = 1,69 ∙ 1,4 = 2,366 кВт
Основные параметры приводного клинового ремня
Из таблицы 2.12 [2]
|
Сеч.р-ня |
|
|
у |
|
S |
L |
M |
|
А |
13 |
11 |
3,3 |
8 |
81 |
560..4000 |
0,1 |
Определяем расчётный диаметр меньшего шкива
 (2.2)
(2.2)
окончательно принимаем ![]()
Определяем диаметр большего шкива
dр2 = dр1 ∙ u (1 – ε) (2.3)
где ε – коэффициент относительного скольжения, ε = 0,01 ![]()
u - передаточное число u = 3,35
dр2 = 90 ∙3,35(1 – 0,01) = 298,5 мм
Принимаю ближайшее стандартное значение dр2 по таблице 1.3 (приложение 3) [2]. В соответствии с ГОСТ 20889-88
dр2 = 300 мм
Фактическое передаточное отношение
Uф =  (2.4)
(2.4)
Uф ![]()
Разность фактического и заданного передаточных чисел
∆ =  (2.5)
(2.5)
∆ = ![]() =0,51%
=0,51%
Минимальное межосевое расстояние амин = 0,7∙(dр1 + dр2) (2.6)
амин = 0,7∙(90 + 300) = 273 мм
Максимальное межосевое расстояние амах = 2∙(dр1 + dр2) (2.7)
амах = 2∙(90 + 300) = 780 мм
Принимаю межосевое расстояние из условия амин<а’<амах
273<а<780 принимаю а’ = 526,5 мм
Расчётная длина ремня
Вычисляется по формуле 1.7 [2]
lр = 2∙![]() +
+ ![]() (2.8)
(2.8)
lр = 2∙526,5 + 1,57∙(90 + 300) +![]() = 1686,2
м
= 1686,2
м
По таблице 1.3 (приложение 2) [2] принимаю L = 1800 мм
Межосевое расстояние, соответствующее принимаемой стандартной
длине клинового ремня а = 0,25 ∙[ Lр - ![]() (2.9)
(2.9)
а =0,25∙ [1800 – 1,57∙390 + ![]() ] = 585
мм
] = 585
мм
Угол обхвата ремнём малого шкива
α1 = 180º - 57,3º ∙ ![]() (2.10)
(2.10)
α1![]() =159,4º
=159,4º
α1≥ 159,4º 159,4º ≥ 110º условие выполняется
Скорость ремня
![]() (2.11)
(2.11)
![]()
![]() = 6,57 м/с
= 6,57 м/с
Номинальная мощность
Номинальная мощность Ро определяется по таблице 1.9 [2]
Ро = 1,08 кВт
Предварительное число клиновых ремней, необходимое для передачи мощности Рр
![]() =
= ![]() (2.12)
(2.12)
![]()
![]() = 3,18 принимаю 3 ремня где Сα – коэффициент, учитывающий
влияние угла обхвата α1 ремнём меньшего шкива на тяговую способность
передачи
= 3,18 принимаю 3 ремня где Сα – коэффициент, учитывающий
влияние угла обхвата α1 ремнём меньшего шкива на тяговую способность
передачи
Ск – коэффициент, учитывающий влияние передаточного числа
СL – коэффициент, учитывающий длину ремня
Эти коэффициенты определяются по таблицам 1.7, 1.11, 1.12 [2]
Сα = 0,943 Ск = 1+0,02 uф =1,07 СL = 1,01
Уточнённое число ремней
Z=![]() (2.13)
(2.13)
![]() -коэффициент, учитывающий число
ремней
-коэффициент, учитывающий число
ремней ![]() =0,8
=0,8
Z=![]()
Окончательно принимаем Z=4
Начальное натяжение ветви одного ремня Fо с закреплёнными центрами шкивов
Fо = 750 ∙ ![]() (2.14)
(2.14)
Fо = 750![]() + 0,1 ∙
6,572 =104,56 Н
+ 0,1 ∙
6,572 =104,56 Н
где mn – масса 1 м ремня, определяется по таблице 1.2 [2] mn = 0,1 кг
Окружная сила, передаваемая комплектом клиновых ремней
Ft = ![]() (2.15)
Ft
(2.15)
Ft ![]() = 90 Н
= 90 Н
Силы натяжения ведущей и ведомой ветвей одного клинового ремня
F1 = Fo + ![]() (2.16)
(2.16)
F2 = Fo - ![]() ; (2.17)
; (2.17)
F1 = 104,56 + ![]() = 149,56Н
= 149,56Н
F2 = 104,5 –![]() = 59,56
Н
= 59,56
Н
Сила давления на вал клиновых ремней
Fв = 2 ∙ Fo ∙ Z ∙ sin![]() (2.18)
(2.18)
Fв = 2 ∙ 104,56 ∙ 4 ∙ sin![]() = 823 Н
= 823 Н
Напряжение в ремне от силы натяжения ведущей ветви
![]() (2.19)
(2.19)
![]()
![]() = 1,846 МПа где S – площадь поперечного сечения ремня, мм2 S = 81 мм2
= 1,846 МПа где S – площадь поперечного сечения ремня, мм2 S = 81 мм2
Напряжение в ремне от изгиба его на меньшем шкиве
![]() (2.20)
(2.20)
где Y – значение расстояния от нейтрального слоя до верхней поверхности клинового таблица 1.3 [2] Y = 3,3 мм
Еи – модуль продольной упругости для материалов ремней Еи = 90 МПа
![]() = 6,6
МПа
= 6,6
МПа
Напряжение в ремне от центробежных сил
συ =![]() (2.21)
(2.21)
где ρ – плотность материала ремня ρ = 1304 кг/м3
συ = ![]() = 0,0533
МПа
= 0,0533
МПа
Максимальное напряжение в ремне
σмах = σ1 + σи + συ (2.22)
σмах = 1,824 + 6,6 + 0,0533 = 8,477 МПа
Прочность обеспечена, если σмах ≤ [σр] = 10 МПа 8,477 ≤ 10 МПа, условие
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.