8. Динамический расчет контура гидропривода
Основной целью динамического расчета является обеспечение максимального быстродействия привода при минимальном перерегулировании. По результатам расчета оценивают качество переходного процесса. Сложность математической модели будет зависеть от принятых допущений при переходе к расчетной схеме.
Основными являются следующие допущения:
1.Свойство жидкости не изменяется во время переходного процесса (температура, плотность, вязкость, количество нерастворенного воздуха);
2.Жидкость может рассматриваться как несжимаемая;
3.Принебрегают сопротивлением сливной магистрали;
4.Принебрегают трением в гидродвигателях;
5.Принебрегают инерционностью массы подвижных элементов;
При моделировании динамики поведения гидравлической системы полуприцепа, система заменяется расчетно-динамической схемой. Динамическая схема строится на основе принципиальной, при этом принимается ряд допущений - схема разбивается на отдельные участки узлами (узловыми точками). В качестве узлов принимают наиболее характерные точки характерные точки принципиальной схемы. При моделировании привода рассматривается система с сосредоточенными параметрами.
Для нашей динамической схемы примем следующие допущения: - свойство жидкости не изменяется во время переходного процесса (температура, плотность, вязкость, количество нерастворенного воздуха);
- пренебрегаем трением в гидроцилиндре;
- принебрегаем сопротивлением в сливной магистрали;
- жидкость сжимаема и вся жидкость, заполняющая напорную часть привода, сосредоточена в одном узле возле исполнительного гидроцилиндра;
- утечки и кавитация отсутствуют;
- распределитель моделируем дросселем переменного сечения;
- входное воздействие h(t) (закон перемещения золотника распределителя) будем задавать в виде типовой функции.
-
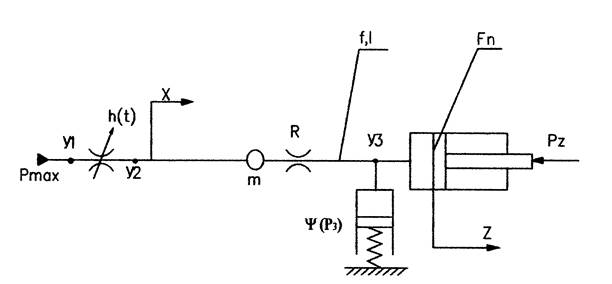 |
Рис. Расчетная динамическая схема.
z-перемещение поршня;
x-перемещение столба жидкости;
R-эквивалентное сопротивление участка трубопровода;
Pz-полезная нагрузка;
![]() -коэффициент
податливости жидкости;
-коэффициент
податливости жидкости;
f-площадь трубопровода;
l-длина трубопровода;
Fп-площадь поршня.
Исследование динамических свойств гидропривода осуществляется путем подачи некоторого входного воздействия и оценки поведения системы при этом воздействии.
В нашем случае входное воздействие моделируется изменением перемещения золотника распределителя на входе.
Для описания гидропривода необходимы 3 группы уравнений:
1.Уравнение движения поршня;
2.Уравнение движения жидкости в трубопроводе (баланс давлений);
3.Уравнение баланса расхода в узлах.
Уравнение движения поршня:
![]() a=
a= ![]() ;
;
mп - масса подвижных элементов, приведенных к поршню;
a - ускорение;
![]() и
и
![]() - сумма активных сил и сил сопротивления,
действующих на поршень;
- сумма активных сил и сил сопротивления,
действующих на поршень;
Fп – активная площадь поршня, со стороны высокого давления.
Для нашего случая уравнение движения поршня запишется в следующем виде:
![]() ;
;
где Pz = C0+C1z – полезная нагрузка, моделируется как многочлен, можно ограничиться двумя слагаемыми, тогда C0 приобретает смысл постоянной нагрузки (сила тяжести, трение), а С1 – коэффициент позиционной нагрузки.
Тогда запишем
![]() ;
;
Записываем уравнение движения жидкости в трубопроводе на участке У2-У3:
p2=p3+![]() p;
p;
![]() p =
p = ![]() pl+
pl+![]() pм+
pм+![]() pj ;
pj ;
где ![]() Pl ,
Pl , ![]() Pj – потери по длине и
инерционные потери;
Pj – потери по длине и
инерционные потери;
![]() Pм – местные потери;
Pм – местные потери;
![]() pм =
pм = ![]() ;
;
где ![]() -
коэффициент местного сопротивления;
-
коэффициент местного сопротивления;
![]() -
скорость жидкости.
-
скорость жидкости.
Для того чтобы избежать разветвления
вычислительного процесса при вычислении ![]() для
потерь по длине, воспользуемся эмпирической непрерывной функцией.
для
потерь по длине, воспользуемся эмпирической непрерывной функцией.
 ;
;
![]() -
кинематическая вязкость;
-
кинематическая вязкость;
![]() -
коэффициент, зависящий от шероховатости внутренних стенок трубопровода.
-
коэффициент, зависящий от шероховатости внутренних стенок трубопровода. ![]() =0.025…0.03.
=0.025…0.03.
![]() ;
;
Подставив составляющие в баланс, получим:
p2=p3+![]() +
+![]() +
+ ;
;
Выражаем старшую производную и сгруппируем слагаемые:
![]() =p3-p2 –(
=p3-p2 –(![]() +
+ sgn
sgn![]() -
- ![]() ;
;
Знак сигнатуры вводится для того, чтобы избежать искажения переходного процесса при знакопеременной скорости движения жидкости (чтобы не получилось так, что трение способствует движению).
В итоге получим:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.