



















2. Выбор и обоснование схемы и узлов проектируемого изделия
После изучения и анализа, поиска недостатков и преимуществ, приведенных выше, гидросистем рулевого управления различных транспортных средств, я сделал выводы и решил взять за основу систему рулевого управления шахтной машины МТЗ-Ш353М (рисунок 2.1), с некоторой доработкой: в схему был добавлен гидроаккумулятор, что в свою очередь позволяет повысить надежность и работоспособность привода (это важный параметр, поскольку транспортное средство работает в шахтах, т.е. в местах повышенной опасности). Надежность увеличивается за счет снижения пульсаций давления, а работоспособность за счет возможности обеспечения привода энергией, при отказе насоса подпитки, за счет гидроаккумулятора.
Гидроаккумулятор, устанавливаемый в данный гидропривод рулевого управления, унифицирован с гидроаккумулятором уставливаемым на технику, производимуемую РУП «МТЗ», что позволяет, без значительных капиталовлажений, внедрить данный элемент в существующий гидропривод рулевого управления шахтных машин.
Принцип работы данной гидравлической схемы будет описан в пункте 3 данной пояснительной записки.
Данная система имеет ряд преимуществ, по сравнению с другими аналогами:
1. Гидросистема рулевого управления проста по конструкции и техническому обслуживанию в сравнении с аналогами;
2. Имеет более низкую стоимость по сравнению с другими системами управления такого типа;
3. Обладает высокой надежностью;
4. Менее жесткие требования к качеству рабочей жидкости;
5. Возможность ремонта и технического обслуживания в условиях шахтных разработок месторождений;
Недостатками данной системы являются низкий КПД и не информативность рулевого, относительно небольшая скорость срабатывания.
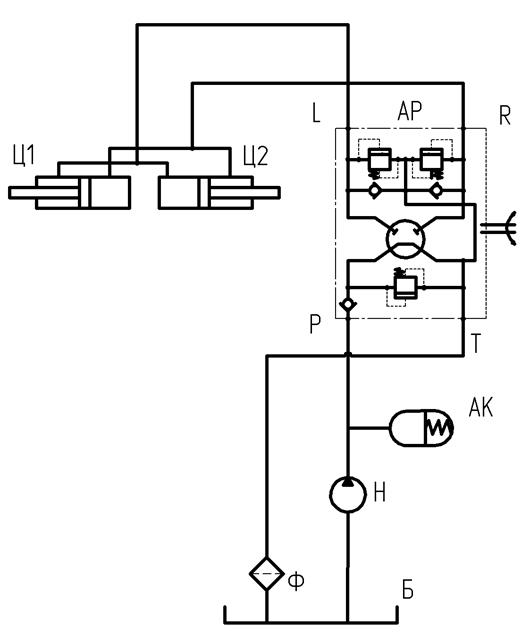
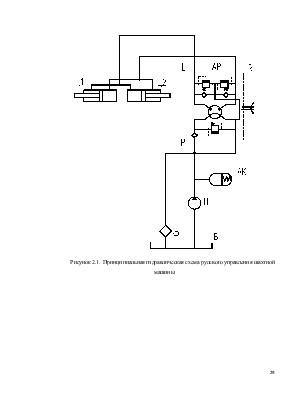
Рисунок 2.1. Принципиальная гидравлическая схема рулевого управления шахтной машины
3. Гидравлическая схема проектируемого гидропривода и описание его работы
На рисунке 2.1 приведена принципиальная гидравлическая схема рулевого управления шахтной машины. Основными элементами схемы являются: Б – бак; Ф – фильтр; Н – насос подпитки; Ц1 и Ц2 - гидроцилиндры поворота; АР – контур насосос-дозатора, АК – гидроаккумуятор.
Принцип работы схемы следующий: при прямолинейном движении машины, цилиндры поворота колес Ц1 и Ц2 находятся в нейтральном положение, т.е. не в одну из полостей гидроцилиндров не подается количество рабочей жидкости, необходимое, для того, чтобы поршни гидроцилиндров начали свое движение. В таком положении гидроцилиндров насос подпитки Н работает на заполнение гидроаккумулятора АК, после его заполнения, насос Н начинает работать в холостом режиме и рабочая жидкость свободно проходя через насос-дозатор, т.к. золотник насос-дозатора находится в нейтральном положении, далее двигается по сливному трубопроводу, затем она попадает в фильтр, где происходит ее очистка, а затем из фильтра в бак Б, где происходит частичное охлаждение рабочей жидкости.
При повороте рулевого колеса золотник насоса-дозатора смещается относительно гильзы, насос Н начинает подавать масло в рабочие полости насос-дозатора АР, а он подает рабочую жидкусть в гидроцилиндры поворота в количестве, пропорциональном углу поворота рулевого колеса, в результате чего гидроцилиндры воздействуют на рычаги рулевой трапеции, и происходит поворот управляемых колес.
В случае отказа насоса подпитки Н, привод будет работать за счет рабочей жидкости подаваемой гидроаккумулятором, после же разрядки последнего, жидкость запрется в полостях гидроцилиндра и управление колесами шахтной машины будет производиться за счет мускульной силы водителя.
4. Проектировочный расчет разрабатываемых изделий и их элементов
4.1 Расчет параметров требуемого насоса
Исходные данные для проектирования гидропривода берутся из технической характеристики системы-аналога:
Диаметр поршня цилиндра (Ц1и
Ц2 на принципиальной схеме)![]() (расчет производиться в пункте 4.4, данной пояснительной записки).
(расчет производиться в пункте 4.4, данной пояснительной записки).
Диаметр штока цилиндра (Ц1и Ц2
на принципиальной схеме)![]() (расчет производиться в пункте 4.4, данной пояснительной записки).
(расчет производиться в пункте 4.4, данной пояснительной записки).
Усилие преодолеваемое штоком гидроцилиндра F1=22,4кН[1].
Время срабатывания t = 1с[1].
Ход поршня L=0,2 м[1].
Найдём площадь поршня:
 ,
(4.1.1)
,
(4.1.1)
Используя формулу 4.1.1, получим:
Найдём площадь кольца, образованного диаметрами поршня и штока:
 ,
(4.1.2)
,
(4.1.2)
Используя формулу 4.1.2, получим:

Скорость перемещения поршня:
![]() ,
(4.1.3)
,
(4.1.3)
где L – ход поршня.
Используя формулу 4.1.3, получим:
![]()
Примем:
![]() объёмный
КПД гидроцилиндра[2],
объёмный
КПД гидроцилиндра[2],
![]() объёмный
КПД аппаратов[2].
объёмный
КПД аппаратов[2].
Расход через цилиндр:
 , (4.1.4)
, (4.1.4)
Используя формулу 4.1.4, найдем расход цилиндра с поршневой рабочей полостью:
Используя формулу 4.1.4, найдем расход цилиндра со штоковой рабочей полостью:
Необходимая подача насоса (учитывая параллельно соединенные между собой цилиндры Ц1 и Ц2):
![]() , (4.1.5)
, (4.1.5)
Используя формулу 4.1.5, получим:
![]() ,
,
Давление, создаваемое насосом для преодоления нагрузки F:
 , (4.1.6)
, (4.1.6)
где ![]() атмосферное
давление,
атмосферное
давление,
![]() гидромеханический
КПД аппаратов,
гидромеханический
КПД аппаратов,
![]() гидромеханический
КПД гидроцилиндра.
гидромеханический
КПД гидроцилиндра.
Используя формулу 4.1.6, получим:
В
соответствии с требуемыми подачей ![]() и
давлением
и
давлением ![]() выбираем
насос НШ – 16 с номинальной подачей
выбираем
насос НШ – 16 с номинальной подачей ![]() =0,000573
=0,000573
![]() и номинальным давлением
и номинальным давлением ![]() =16МПа.
=16МПа.
4.2 Расчет трубопроводов и суммарных потерь давления в гидравлической
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.