Описание устройства и работы автоматической системы, разработка ее функциональной схемы.
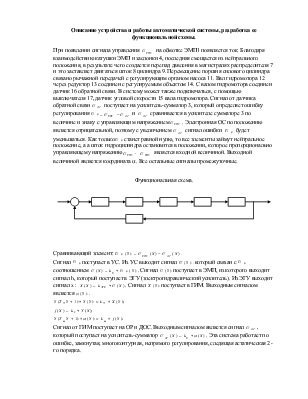
При появлении сигнала управления ![]() на
обмотке ЭМП1 появляется ток. Благодаря взаимодействию катушки ЭМП и заслонки 4,
последняя смещается из нейтрального положения, в результате чего создается
перепад давления в магистралях распределителя 7 и это заставляет двигаться шток
8 цилиндра 9. Перемещение поршня силового цилиндра связано рычажной передачей с
регулирующим органом насоса 11. Вал гидромотора 12 через редуктор 13 соединен с
регулируемым объектом 14. С валом гидромотора соединен датчик 16 обратной
связи. В систему может также подключаться, с помощью выключателя 17, датчик
угловой скорости 15 вала гидромотора. Сигнал от датчика обратной связи
на
обмотке ЭМП1 появляется ток. Благодаря взаимодействию катушки ЭМП и заслонки 4,
последняя смещается из нейтрального положения, в результате чего создается
перепад давления в магистралях распределителя 7 и это заставляет двигаться шток
8 цилиндра 9. Перемещение поршня силового цилиндра связано рычажной передачей с
регулирующим органом насоса 11. Вал гидромотора 12 через редуктор 13 соединен с
регулируемым объектом 14. С валом гидромотора соединен датчик 16 обратной
связи. В систему может также подключаться, с помощью выключателя 17, датчик
угловой скорости 15 вала гидромотора. Сигнал от датчика обратной связи ![]() поступает
на усилитель-сумматор 3, который определяет ошибку регулирования
поступает
на усилитель-сумматор 3, который определяет ошибку регулирования ![]() e
e![]() и
и ![]() сравнивается
в усилителе сумматоре 3 по величине и знаку с управляющим напряжением
сравнивается
в усилителе сумматоре 3 по величине и знаку с управляющим напряжением![]() .
Электронная ОС по положению является отрицательной, поэтому с увеличением
.
Электронная ОС по положению является отрицательной, поэтому с увеличением ![]() сигнал
ошибки
сигнал
ошибки ![]() e будет
уменьшаться. Как только
e будет
уменьшаться. Как только![]() e станет равной
нулю, то все элементы займут нейтральное положение, а а шток гидроцилиндра
остановится в положении, которое пропорционально управляющему напряжению
e станет равной
нулю, то все элементы займут нейтральное положение, а а шток гидроцилиндра
остановится в положении, которое пропорционально управляющему напряжению![]() .
.
![]() является
входной величиной. Выходной величиной является координата a. Все остальные сигналы
промежуточные.
является
входной величиной. Выходной величиной является координата a. Все остальные сигналы
промежуточные.
Функциональная схема.
 |
Сравнивающий элемент: ![]() e
e ![]()
![]() .
.
Сигнал ![]() e поступает в УС.
Из УС выходит сигнал
e поступает в УС.
Из УС выходит сигнал ![]() ,
который связан с
,
который связан с ![]() e соотношением
e соотношением ![]()
![]() e
e ![]() . Сигнал
. Сигнал ![]() поступает
в ЭМП, из которого выходит сигнал h, который поступает в
ЭГУ (электрогидравлический усилитель). Из ЭГУ выходит сигнал x :
поступает
в ЭМП, из которого выходит сигнал h, который поступает в
ЭГУ (электрогидравлический усилитель). Из ЭГУ выходит сигнал x : ![]() .
Сигнал
.
Сигнал ![]() поступает
в ГИМ. Выходным сигналом является
поступает
в ГИМ. Выходным сигналом является ![]() .
.
![]()
![]()
![]()
Сигнал от ГИМ поступает на ОР и ДОС. Выходным
сигналом является сигнал ![]() ,
который поступает на усилитель-сумматор
,
который поступает на усилитель-сумматор ![]() .
Эта система работает по ошибке, замкнутая, многоконтурная, непрямого
регулирования, следящая астатическая 2-го порядка.
.
Эта система работает по ошибке, замкнутая, многоконтурная, непрямого
регулирования, следящая астатическая 2-го порядка.
Разработка математической модели и структурной схемы заданной системы.
![]()
![]() e
e ![]() ;
; ![]() - безинерционное звено;
- безинерционное звено;
где ![]() - коэффициент усиления усилителя.
- коэффициент усиления усилителя.
![]() ;
;![]() м/В – безинерционное звено;
м/В – безинерционное звено;
где ![]() - коэффициент усиления электрогидроусилителя;
- коэффициент усиления электрогидроусилителя;
![]()
![]() - произведение интегрирующего звена и апериодического звена 1-го
порядка, где
- произведение интегрирующего звена и апериодического звена 1-го
порядка, где ![]() -
коэффициент усиления пары золотник-цилиндр.
-
коэффициент усиления пары золотник-цилиндр.
![]() м/с;
м/с;
![]() с
- постоянная времени пары золотник цилиндр.
с
- постоянная времени пары золотник цилиндр.
![]() .
.
![]()
![]()
![]()
![]() -произведение интегрирующего звена и апериодического звена 1-го
порядка, где
-произведение интегрирующего звена и апериодического звена 1-го
порядка, где ![]() -
коэффициент усиления гидропередачи;
-
коэффициент усиления гидропередачи;
![]() -
коэффициент усиления рычажной передачи;
-
коэффициент усиления рычажной передачи;
![]() =50;
=50;
![]()
где ![]() -рабочий
объем гидромотора;
-рабочий
объем гидромотора;
![]() -
коэффициент усиления насоса по расходу;
-
коэффициент усиления насоса по расходу;
![]() -
коэффициент вязкого трения;
-
коэффициент вязкого трения;
![]() -
коэффициент утечек;
-
коэффициент утечек;
![]() с;
с;
где ![]() -
постоянная времени гидропередачи;
-
постоянная времени гидропередачи;
I - приведенный к валу гидромотора момент инерции вращающихся частей;
![]()
![]() ;
;
![]() - безинерционное звено;
- безинерционное звено;
где ![]() -
коэффициент усиления датчика,
-
коэффициент усиления датчика, ![]() B/рад.
B/рад.
Структурная схема системы.

Определим передаточную функцию разомкнутой исходной системы:
![]()
![]()
![]()
Определим передаточную функцию замкнутой исходной системы:
![]()
![]()
Оценка устойчивости замкнутой системы.
Оценку устойчивости замкнутой системы будем проводить по критерию Гурвица. Передаточная функция замкнутой системы имеет вид:
![]()
![]() ;
;
![]()
![]()
![]()
Если ![]() ,
то для устойчивости линейной САР необходимо и достаточно, чтобы были
положительны
,
то для устойчивости линейной САР необходимо и достаточно, чтобы были
положительны ![]() определителей
Гурвица:
определителей
Гурвица:
![]()
![]()
![]() Þ система неустойчива.
Þ система неустойчива.
Определение частотных характеристик системы.
Строим ЛАЧХ и ЛФЧХ разомкнутой САР.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Результаты сводим в таблицу.
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
|||||
|
|
Построение желаемой ЛАЧХ системы и оценка качества САР.
Построение низкочастотной области желаемой ЛАЧХ. Определяем добротность системы по скорости. Для системы с астатизмом 2-го порядка первая асимптота пересекает ось частот при частоте:
![]() ;
;
![]() дек.
дек.
Из точки ![]()
![]() проводим
прямую с наклоном –40 дБ/дек, т.к. исходная САР является астатической системой
2-го порядка.
проводим
прямую с наклоном –40 дБ/дек, т.к. исходная САР является астатической системой
2-го порядка.
Определяем первую сопрягающую частоту, принимая, что имеет место однократный излом:
![]()
![]() ;
;
![]()
При частоте ![]() на
прямую с наклоном -40 дБ находим точку B. Из точки В проводим прямую под наклоном
–60 дБ/дек, т.к. в т.В асимптота имеет однократный излом.
на
прямую с наклоном -40 дБ находим точку B. Из точки В проводим прямую под наклоном
–60 дБ/дек, т.к. в т.В асимптота имеет однократный излом.
Построим среднечастотную область желаемой ЛАЧХ.
Определяем частоту среза: ![]()
![]() ;
;
где ![]() -
коэффициент, зависящий от заданного перерегулирования
-
коэффициент, зависящий от заданного перерегулирования![]() .
.
При ![]()
![]()
![]() дБ;
дБ;![]() дБ;
дБ;
![]()
![]()
Отложим значение ![]() и
через нее проводим прямую с наклоном –20 дБ/дек до пересечения с лева с прямой
–60 дБ/дек, получим т.С.
и
через нее проводим прямую с наклоном –20 дБ/дек до пересечения с лева с прямой
–60 дБ/дек, получим т.С.
Находим границы среднечастотной области ЛАЧХ ![]() и
и
![]() ,
а также запас:
,
а также запас:
![]() дБ;
дБ;![]() дБ;
дБ;
![]()
Откладываем ординаты ![]() и
проводим, и проводим параллельные оси частот.
и
проводим, и проводим параллельные оси частот.
Находим частоты ![]() при
при
![]()
![]() ,
при
,
при ![]() ;
;
![]() ;
; ![]() ;
;
![]()
![]() ;
;![]()
![]() ;
;
Необходимо выполнение условия: ![]() ,
,![]() .
.
Для построения высокочастотной области желаемой ЛАЧХ
и сопряжения ее со среднечастотной необходимо построить ЛАЧХ исходной САР в
разомкнутом состоянии ![]() .
Построим асимптотическую ЛАЧХ:
.
Построим асимптотическую ЛАЧХ:
![]()
![]() ;
;
![]()
![]()
![]() ;
;
![]()
При ![]() ЛАЧХ
проходит через точку с ординатой:
ЛАЧХ
проходит через точку с ординатой:
![]() дБ.
дБ.
Скорректируем САР за счет изменения коэффициента исходной разомкнутой САР, стремясь добиться наибольшего приближения исходной ЛАЧЧ, к желаемой.
Добавляем в ОС дополнительное звено с передаточной
функцией ![]()
![]() дБ.
дБ.
Через точку ![]() и
и
![]() дБ
проводим прямую с наклоном -40 дБ/дек. В результате построения получается
дБ
проводим прямую с наклоном -40 дБ/дек. В результате построения получается ![]() ,
которая является асимптотической ЛАЧХ исходной САР. Для получения наиболее
простой реализации КУ наклоны высокочастотной область желаемой ЛАЧХ принимаем
равными
,
которая является асимптотической ЛАЧХ исходной САР. Для получения наиболее
простой реализации КУ наклоны высокочастотной область желаемой ЛАЧХ принимаем
равными ![]() ,
с теме же точками излома на частотах
,
с теме же точками излома на частотах ![]() Желаемая
ЛАЧХ – ломаная
Желаемая
ЛАЧХ – ломаная ![]() .
.
Для проверки правильности построения желаемой ЛАЧХ
необходимо в точках ![]() и
и
![]() при
при
![]() найти
избыток фазы при частоте
найти
избыток фазы при частоте ![]()
![]() .
.
![]()
![]() -
порядок астатизма системы;
-
порядок астатизма системы;
![]() -
сопрягающие частоты;
-
сопрягающие частоты; ![]() ,
при которых
,
при которых ![]() изменяется
на –20 дБ/дек;
изменяется
на –20 дБ/дек;
![]() - число сопрягающих частот
- число сопрягающих частот ![]() ;
;
![]() -
сопрягающие частоты;
-
сопрягающие частоты; ![]() ,
при которых
,
при которых ![]() изменяется
на +20 дБ/дек;
изменяется
на +20 дБ/дек;
![]() -
число сопрягающих частот
-
число сопрягающих частот ![]() ;
;
![]() ;
;![]()
![]() ;
;
![]() ;
;![]()
![]() ;
;![]() ;
;
![]()
![]()
![]()
![]()
где ![]() -
число сопрягающих частот, больших частоты среза
-
число сопрягающих частот, больших частоты среза ![]()
![]() ;
;
![]() - сопрягающие частоты
- сопрягающие частоты ![]() ;
;
![]() ;
;
![]()
![]() ;
;
Вычитаем из ![]() ЛАЧХ
ЛАЧХ
![]() исходной
САР и получим ЛАЧХ последовательного корректирующего устройства:
исходной
САР и получим ЛАЧХ последовательного корректирующего устройства: ![]()
![]()
![]()
Коррекция САР и расчет параметров корректирующего устройства.
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.