![]() Министерство
образования и науки Российской Федерации
Министерство
образования и науки Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
«Комсомольский-на-Амуре государственный технический университет »
Кафедра МАХП
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине «Детали машин»
«Привод к скребковому конвейеру»
Выполнил студент группы.
Преподаватель
2013 г
Содержание:
1. Условия эксплуатации приводного устройства. ...............................................
2. Выбор электродвигателя. Кинематический и силовой расчет двигателя.......
2.1 Определение общего кпд привода ...............................................................
2.2 Определение мощности двигателя ...............................................................
2.3 Определение частоты вращения приводного вала рабочей машины .......
2.4 Определение передаточного числа привода ...............................................
2.5 Определение мощности ................................................................................
2.6 Определение частоты вращения и угловые скорости................................
2.7 Определение крутящих моментов .............................................................. .
3. Расчет закрытой передачи. ..................................................................................
3.1 Выбор материала.......................................................................................
3.2 Расчет допускаемых напряжений.............................................................
3.3 Определение допустимых напряжения изгиба…………………………
4. Расчёт закрытой цилиндрической прямозубой передачи редуктора................
4.1 Определение межосевого расстояния.........................................................
4.2 Определение модуля зацепления................................................................
4.3 Определение угла наклона зубьев..............................................................
4.4 Определение суммарного числа зубьев шестерни и колеса....................
4.5 Уточнение действительной величины угла наклона зубьев....................
4.6 Определение числа зубьев шестерни.........................................................
4.7 Определение числа зубьев колеса..............................................................
4.8 Определение фактического значения передаточного числа ..................
4.9 Определение фактического межосевого расстояния..............................
4.10 Определение основных геометрических параметров передачи...........
5. Проверочный расчет передачи .........................................................................
5.1 Проверяем пригодность заготовок колес по условиям пригодности....
5.2. Проверяем контактные напряжения......................................................
5.3 Проверка напряжений изгиба зубьев шестерни и колеса......................
6. Проектный расчёт валов....................................................................................
6.1 Выбор материала валов.............................................................................
6.2 Определение геометрических параметров ступеней валов...................
7. Предварительный выбор подшипников........................................................ …
8. Нагрузки валов редуктора................................................................................ ..
8.1 Определение силы в зацеплении закрытой передачи............................
8.2 Определение консольных сил...................................................................
9. Расчетная схема валов редуктора........................................................................
9.1 Определение реакций в опорах подшипников........................................
9.1 Тихоходный вал редуктора............................................................
10. Проверочный расчет подшипников...........................................................
10.1 Определение пригодности выбранных подшипников.........................
11.1.1 Тихоходный вал..............................................................................
Список используемых источников.
Задание
Привод к скребковому конвейеру
Таблица 1
|
Тяговая сила цепи F, кН. |
14,0 |
|
Скорость грузовой цепи V, м/с. |
0,65 |
|
Шаг грузовой цепи р, мм. |
80 |
|
Число зубьев звездочки Z, лет |
8 |
|
Срок службы привода L, лет |
5 |
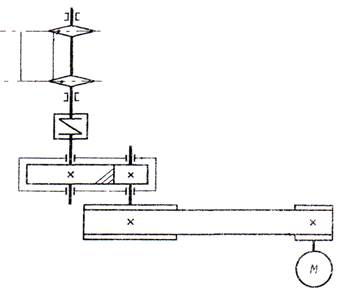
Рис.1
1. Кинематический расчет привода
1.1 Условия эксплуатации приводного устройства.
Срок службы ( ресурс ):
Lh = 365∙L∙Kr∙tc∙Lc∙Kc
где L – срок службы привода;
Kr – коэффициент годового использования;
tc – продолжительность смены , час;
Lc- число смен;
Kc- коэффициент сменного использования.
Принимаем : Kr= 0,9; tc= 8; Lc= 1; Kc= 0,9.
Lh= 365∙5∙0,9∙8∙1∙0,9 = 11,826∙103 ч.
Требуемая мощность рабочей машины:
Ррм= F ∙ V
где V – линейная скорость, м/с.
F – усилие на тяговом органе рабочей машины, кН.
Ррм = 14 ∙ 0,65 = 9,1 кВт
2. Выбор электродвигателя. Кинематический и силовой расчет двигателя.
2.1 Определяем общий КПД привода по формуле:
hобщ=hзп×hоп×hм×hпк×hпс, где hзп - кпд закрытой зубчатой (косозубой) передачи ( редуктора );
hоп – кпд открытой ременная передачи;
hм - кпд муфты;
hпк - кпд подшипников качения ( по кинематической схеме в редукторе две пары подшипников );
hпс - кпд подшипников скольжения ( на приводном валу рабочей машины одна пара подшипников ).
По таблице 2.1 ( уч. п. ) назначаем следующие значения КПД элементов двигателя:
ηзп = 0,97; ηоп = 0,96; ηм = 0,98; ηпк = 0,99; ηпс = 0,98.
ηобщ = 0,97·0,96·0,98·0,992·0,98 = 0,877.
1.2.2 Определяем мощность двигателя Рдв в кВт по формуле:
Рдв = Ррм /ηобщ;
Рдв =9,1/0,877 = 10,4
Определяем номинальную мощность двигателя Рном
Рном ≥ Рдв.
Выбираем электродвигатель асинхронный 4А160S6У3.
Номинальная мощность: Рном=11.0 кВт;
Номинальная частота: пном=1450 мин -1.
2.3 Определяем частоту вращения приводного вала рабочей машины nрм, об/мин по формуле:
прм = (60·1000∙V)/(z·p), где V – скорость грузовой цепи, м/с;
Z-число зубьев звёздочки ;
р - шаг грузовой цепи
прм=60∙1000∙0,65/8·80=60,94 об/мин-1.
2.4 Определяем передаточное число привода для приемлемого варианта типа двигателя при заданной номинальной мощности по формуле
и = пном / прм
и =1450/ 60,94 = 23,8.
Разбивка передаточного числа привода:
и = изп∙иоп.
где uоп – передаточное число открытой передачи; uзп – передаточное число закрытой цилиндрической передачи; и – передаточное число привода.
Принимаем изп = 6,3 тогда:
иоп=33,25/6,3=3,8
Определяем максимально допустимое отклонение частоты вращения 5%:
![]() nрм=nрм·δ/100 60,94·5/100=3,0
nрм=nрм·δ/100 60,94·5/100=3,0
2.5 Определяем мощности Рi , кВт на валах привода по формулам:
Рдв = 11,0 кВт – вал двигателя.
Р1 = Рдв·ηм·ηпк - быстроходный вал привода.
Р1 = 11,0·0,96·0,99 = 10,45 кВт.
Р2 = Р1·ηзп·ηпк - тихоходный вал привода.
Р2 = 10,45 ·0,97·0,99 = 10,04 кВт.
Ррм = Р2·ηоп·ηпс - вал рабочей машины.
Ррм = 10,04 ·0,98·0,98 = 9,6 кВт.
2.6 Определяем частоты вращения ni , об/мин валов привода:
пном = 1450,
n1 = nном / иоп
n1 = 1450 / 3,8=381,6,
n2 =п1 / изп ;
п2 =381,6 /6,3= 60,6;
прм = n2 = 60,6.
2.7 Определяем угловые скорости ωi , рад/с валов привода:
ωном = πnном/30;
ωном = π·1450 / 30 = 151,8.
ω1 = ωном / иоп
ω 1 = 151,8/ 3,8 = 39,9;
ω2 = ω1 / изп.
ω 2 = 39,9/ 6,3 = 6,33;
ωрм =ω2 = 6,33.
2.8 Определяем крутящие моменты Тi , Н·м на валах привода по формуле:
Тдв = Рдв /ωном;
Тдв = 11,0·1000 / 151,8 = 72,5;
Т1 = Тдв·ηм·ηпк;
Т1 = 72,5·3,8·0,96·0,99 = 261,8;
Т2 = Т1· изп ·ηзп·ηпк;
Т2 = 261,8·6,3·0,97·0,99 = 1584;
Трм = Т2·uоп∙ ηоп·ηпс;
Трм = 1584·0,98∙0,98 = 1521,3.
3 Расчет открытой ременной передачи
3.1 Выбираем тип и сечение ремня:
В зависимости от мощности передаваемой ведущим шкивом и его частоты вращения по номограмме.
Выбираем поликлиновой ремень по РТМ 38-40528-74 сечения Л, диаметр ведущего шкива принимаем 125мм.
3.2 Определяем диаметр ведомого шкива:
d2=d1·u·(1-ε)
Где u =3,8– передаточное число,
ε-коэффициент скольжения (0,01…0,02)
d2=140·2,85·(1-0,01) = 470,3
принимаем ближайший стандартный 500мм.
3.3 Определяем фактическое значение передаточного числа :
uф = d2/ d1·(1-ε);
uф = 500/125·(1-0,01)=4,04.
Проверим отклонение ∆u от заданного u
∆u = (│uф − u│/u)·100% ≤ 4%;
∆u = (│3,8 -4,04│/3,8)·100% = 6,3% ≤ 4%
Нормы отклонения передаточного числа соблюдены.
3.4 Определяем оптимальное межосевое расстояние, мм:
ар ≥ 0,55· (d2+ d1)+H где h – высота сечения клинового ремня;
ар ≥ 0,55· (125+ 500)+9,5= 438,8
Принимаем 440
3.5 Определяем расчётную длину ремня, мм:
L= 2· aр+π0,5(d2+ d1)+[( d2- d1)2 /4·aр
L= 2· 440+0,5· π· (125+500)+ ( 500-125) 2/ 4·440=2021,5
принимаем L =2240мм.
3.6 Уточняем межосевое расстояние ,мм:
a=0,125·{[2·L- π· (d2+d1)]+ ![]()
a=0,125·{[2·2240-
π· (500+ 125)]+ ![]()
a=599,8
3.6.1 Определяем монтажное межосевое расстояние aм:
aм=а-0,01·L=599,8-0,01·2240= 577,4
3.6.2 Определяем монтажное межосевое расстояние для натяжения ремня aн:
aн=а+0,025·L=599,8+0,025·2240=655,8
3.7 Определяем угол обхвата ремнём ведущего шкива:
α1= 1800
-570 ·![]() =1800 -570
·
=1800 -570
·![]() =144,40
=144,40
3.8 Определяем скорость ремня v, м/с:
v=π·d1·n1/(60·103)≤ [v]
v = π·125·1450/(60·103)=9,5
3.9 Определяем частоту пробегов ремня:
U= v/L ≤ [U] где [U] =30с-1
U= 9,5/2,24= 4,24<[U]
3.10 Определяем допускаемую мощность передаваемую одним ремнём:
[Pп]= [P0] ·Cp·Cα·CL
где [P0] – допускаемая приведенная мощность, передаваемая одним клиновым по таб. 5.5 (1), С –поправочный коэффициент принимаем по таб. 5.2 (1)
[Pп]= 10,4·0,8·0,86·1,06=7,6
[Pп]=7,6
3.11 Определяем количество поликлиновых ремней:
z=10 Pном/[Pп]= 10· 11/7,6=14,5
где Pном – номинальная мощность двигателя.
Принимаем z= 15
3.12 Определяем силу предварительного натяжения ремней, Н:
![]()
![]() =1516,4
=1516,4
3.13 Определим окружную силу, передаваемую ремнём:
Ft=Pном·1000/ v = 11·1000/9,5=1158Н.
3.14 Проверяем силы натяжения ведущей F1 и ведомой F2:
F1 = F0 +Ft /2 F1 = 1516,4+1158/2 =2095,4Н
F2 = F0 -Ft /2 F2 = 1516,4-1158/2 =937,4 Н
3.15 Определяем силу давления на вал Fоп:
Fon=2·Fо ·sinα/2 = 2·1516,4·sin 144,4/2 = 2888Н
Проверочный расчёт.
3.16 Определяем прочность ремня по максимальным напряжениям в сечении ведущей ветви σmax, Н/мм2:
σmax= σ1+ σи+ σv ≤ [σ]p
а) где σ1 – напряжение растяжения, Н/мм2;
σ1=![]() σ1=
σ1=![]() =0,59
=0,59
где А площадь поперечного сечения, мм2.
А =0,5b(2H-h)
А =0,5· (4,8·16)(2·9,5-4,85) =3539
б) где σи – напряжение изгиба, Н/мм2;
σ1=![]() =
=![]() =6,08
=6,08
где Еи= 80…100 мм2 – модуль продольной упругости при изгибе,
H – высота сечения ремня.
в) где σv – напряжение от центробежных сил, Н/мм2
σv=ρ·v2·10-6 =1250·9,52·10-6 = 0,14
г) [σ]p=8 Н/мм2 – допускаемое напряжение растяжения ремня.
σmax= 0,59+6,08+0,14 = 6,81 ≤ 8
Условие прочности по напряжениям выполнено.
4. Расчет закрытой передачи
4.1 Выбор материала
В зависимости от передаваемой мощности выбираем следующие марки стали: для шестерни − 40Х, твердость Н≤350НВ ( 269…302НВ); для колеса – 40Х, твердость Н ≤ 350 НВ ( 265…295 НВ). Термообработка – улучшение.
Допускаемое напряжение при числе циклов перемены напряжений NHO, NFO. Присваиваем индекс 1 – шестерне , индекс 2 – колесу.
[σ]НО1=14 НRCэср + 170
[σ]НО1=14∙(40+50)/2+170 = 835 Н/мм2
[σ]НО2=1,8НВср+ 67
[σ]НО2=1,8∙(269+302)/2+67=581Н/мм2
[σ]FO1=310 Н/мм2 при m <3мм.
[σ]FO=1,03∙НВср
[σ]FO2=1,03∙(269+302)/2=294Н/мм2
4.1.1 Определение допустимых контактных напряжений
Рассчитываем коэффициент долговечности
![]()
где NHO- число циклов перемены напряжений, соответствующее пределу выносливости;
N- число циклов перемены напряжений за весь срок службы ( выработка ).
Определяем наработку за весь срок службы N в циклах для колеса по формуле:
N = 573×w×Lh, где Lh - срок службы привода (ресурс), ч.;
ω – угловая скорость.
N1=573∙151,8∙11,826∙103=10,28642∙108 циклов.
N2=573∙39,9∙11,826∙103=1,6263∙108 циклов.
NНО=25∙106 циклов так какN1> N2> NНО , то Принимаем КHL1=1 КHL2=1, .
Допускаемые контактные напряжения для зубьев шестерни ([σ]Н1) и колеса ([σ]Н2):
[σ]Н1= КHL[σ]НО1 или [σ]Н1=[σ]НО1
[σ]Н2=КHL∙[σ]НО2 или [σ]Н2=[σ]НО2
Дальнейший расчёт выполняем при наименьшему значению из [σ]Н1 и [σ]Н2:
[σ]Н= КFL·[s]Н1=1·581 =581 Н/мм2
4.1.2 Определение допустимых напряжения изгиба
NFO=4∙106 циклов
N1> N2> NFO
для шестерни:
[s]F1 = КFL·[s]F01;
[s]F1 = 1·310 = 310 Н/мм2;
для колеса:
[s]F2 = КFL·[s]F02;
[s]F2 = 1·288,4= 288,4 Н/мм2.
Дальнейший расчёт выполняем по наименьшему значению из [s]F1 и [s]F2;
[s]F= 288,4 Н/мм2
NFO=4∙106 циклов
Так как N1> N2> NFO то принимаем КFL1=1, КFL2=1.
5 Расчет закрытой цилиндрической косозубой передачи
5.1 Определяем межосевое расстояние аw , мм по формуле:
аw ³ Kа·(u + 1)·  , где
u – передаточное число закрытой передачи (u=6,3);
, где
u – передаточное число закрытой передачи (u=6,3);
Kа− вспомогательный коэффициент, для косозубой передачи
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.