Координатные столбцы ![]() –
линейно независимы, следовательно, векторы
–
линейно независимы, следовательно, векторы ![]() тоже
линейно независимы и значит
тоже
линейно независимы и значит ![]() –
базис в линейном пространстве решений системы уравнений.
–
базис в линейном пространстве решений системы уравнений.
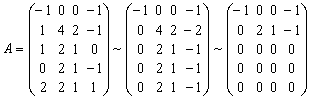
Найдем ранг матрицы системы

(поменяли местами первую и третью строки).
Вычтем элементы первой строки из соответствующих элементов второй строки, а затем элементы первой строки умножим на –3 и прибавим к элементам третьей строки, получим

(при
последнем преобразовании вычли элементы третьей строки из соответствующих
элементов четвертой строки). Ранг матрицы системы равен двум, значит
размерность пространства решений системы равна ![]() .
.
Исходная система равносильна системе
![]() ,
,
Полагая в этой системе сначала ![]() ; затем
; затем ![]() ; а потом
; а потом ![]() , находим три линейно
независимых решения:
, находим три линейно
независимых решения:
а) ![]() ,
,
![]() ,
, ![]()
б) ![]() ,
,
![]() ,
, ![]()
в) ![]() ,
,
![]() ,
, ![]()
 ,
,  ,
,  .
.
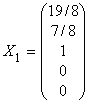
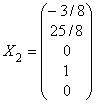
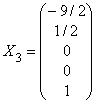
Таким образом, базисом пространства решений будут, например, векторы:
![]() ,
,
здесь, для упрощения, координаты первых двух векторов умножены на 8, а координаты последнего – на 2.
Пример 8.4. Найти размерность и базис линейного подпространства, являющегося линейной оболочкой векторов.
![]()
Решение. Составим из координат векторов системы матрицу и с помощью элементарных преобразований определим ее ранг. Ранг этой матрицы будет совпадать с числом линейно независимых векторов в системе и значит, равен размерности оболочки векторов (см. раздел 1). Матрица из координат векторов имеет вид:
здесь,
сначала элементы первой строки прибавили к соответствующим элементам второй и
третьей строк, потом элементы первой строки умножили на два и прибавили к
соответствующим элементам пятой строки, после чего элементы второй строки разделили
на два и результат вычли из третьей, четвертой и пятой строк. Таким образом
ранг матрицы равен двум, т.е. в системе два линейно независимых вектора, значит
размерность линейной оболочки векторов равна двум. В качестве базиса можно
взять, например векторы ![]() .
.
Пример 8.5. Пусть ![]() Являются ли линейными
следующие преобразования?
Являются ли линейными
следующие преобразования? ![]()
![]()
Решение. Преобразование будет линейным, если
все координаты образов векторов будут линейными комбинациями координат вектора ![]() . Здесь в преобразовании
. Здесь в преобразовании ![]() вторая координата равная
вторая координата равная ![]() не является линейной
комбинацией, в преобразовании
не является линейной
комбинацией, в преобразовании ![]() -
аналогично, кроме того третья координата имеет вид
-
аналогично, кроме того третья координата имеет вид ![]() ,
что так же не является линейной комбинацией координат вектора
,
что так же не является линейной комбинацией координат вектора ![]() . Значит эти преобразования
не являются линейными. Преобразование
. Значит эти преобразования
не являются линейными. Преобразование ![]() является
линейным.
является
линейным.
Пример 8.6. Найти матрицу линейного
преобразования ![]() в базисе
в базисе ![]() если она задана в базисе
если она задана в базисе ![]()
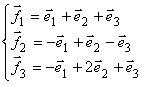 ,
,  .
.
Решение. При переходе от базиса e к
базису f матрица линейного преобразования, в соответствии с
определением, будет иметь вид (см. (4.1)) ![]() ,
где T матрица перехода, которая находится из равенства f = eT.
Здесь
,
где T матрица перехода, которая находится из равенства f = eT.
Здесь 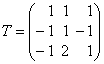 .
.
Найдем определитель матрицы: 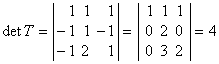
(прибавили к элементам второй и третьей строк соответствующие элементы первой строки и записали формулу разложения определителя по первому столбцу).
Найдем алгебраические дополнения к элементам
матрицы T и обратную матрицу по формуле ![]() :
:
![]()
![]() .
.
Таким образом, обратная матрица будет 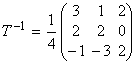 и, следовательно,
и, следовательно,


 .
.
Пример 8.7. Определить ранг и дефект линейного
преобразования, а также найти базисы образа и ядра ![]() при преобразовании
при преобразовании ![]() .
.
![]() .
.
Решение. Пусть в ![]() выбран базис
выбран базис ![]() , тогда в этом базисе матрица
преобразования
, тогда в этом базисе матрица
преобразования ![]() будет иметь
вид:
будет иметь
вид:
 .
.
По определению вектор ![]() принадлежит
образу
принадлежит
образу ![]() при преобразовании
при преобразовании ![]() в том и только том
случае, когда найдется вектор
в том и только том
случае, когда найдется вектор ![]() такой,
что
такой,
что ![]() , или в координатной
записи по формуле (3.4):
, или в координатной
записи по формуле (3.4):
 .
.
Это равенство означает, что образ ![]() совпадает с линейной оболочкой системы
векторов
совпадает с линейной оболочкой системы
векторов ![]() , так как
, так как ![]() . Следовательно,
ранг оператора
. Следовательно,
ранг оператора ![]() , который
совпадает с рангом его матрицы, равен двум. В качестве базиса можно взять любой
базис линейной оболочки векторов
, который
совпадает с рангом его матрицы, равен двум. В качестве базиса можно взять любой
базис линейной оболочки векторов ![]() , например,
, например,
![]() – они линейно независимы.
– они линейно независимы.
Аналогично вектор ![]() принадлежит
ядру тогда и только тогда, когда
принадлежит
ядру тогда и только тогда, когда ![]() , или,
в координатной записи:
, или,
в координатной записи:
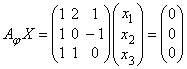 .
.
Это однородная система линейных уравнений, ранг которой равен двум, значит, она эквивалентна следующей системе:
![]() , полагая
в которой, например,
, полагая
в которой, например, ![]() , получаем
, получаем ![]() , т.е. базис ядра
состоит из одного вектора
, т.е. базис ядра
состоит из одного вектора ![]() .
.
При этом по теореме 3.5, размерность ядра равна:
![]() .
.
Пример 8.8. Доказать линейность, найти матрицу, область значений и ядро оператора:
а) проектирования на плоскость ![]() ;
;
б) зеркального отражения относительно
плоскости ![]() .
.
Решение. Рассмотрим произвольный вектор ![]() . Отложим его от начала
координат, тогда координаты точки конца вектора будут
. Отложим его от начала
координат, тогда координаты точки конца вектора будут ![]() . Проекцию этого вектора
на плоскость
. Проекцию этого вектора
на плоскость ![]() обозначим
обозначим ![]() , а зеркально отраженный
, а зеркально отраженный
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




