Динамическое торможение – якорь отключается от сети и замыкается на Rдоб. При этом ОВ остается под напряжением.
 U=E+IR →
U=E+IR → ![]() -
двигат.
-
двигат.
![]() - динамическое торможение
- динамическое торможение
Ток меняет знак и становится тормозным ( и момент). Под действием Мторм ДПТ интенсивно тормозится.
Противовключение
1 метод: изменим полярность U на
якоре (или на ОВ). U=E+IR → ![]() (т.к.
поменяем полярность), → I меняет знак, → М меняет знак и станет тормозным.
Вводится более большое Rдоб, т.к. I
большой
(т.к.
поменяем полярность), → I меняет знак, → М меняет знак и станет тормозным.
Вводится более большое Rдоб, т.к. I
большой
![]()
В точке 3 ДПТ нужно отключить от сети, иначе он разгоняется назад.
ДПТ переходит в точку 2 (2') и под действием Мторм. Интенсивно тормозится.
2 метод: тормозной спуск грузов в противовключении.
ЭД включают на подъем, а тяжелый груз опускается. Для ограничения токов в цепь якоря вводят большое Rдоб. Идет опускание в режиме противовключения (точка 5).
Генераторный с рекуперацией
ЭД включают на опускание груза, и под действием ∑М ЭД разгоняется до ω>ω0. М меняет свой знак и становится тормозящим.
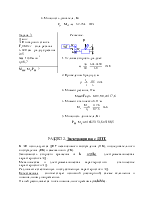
№1 ДПТ НВ
![]() Дано:
ωн=131 рад/с
Дано:
ωн=131 рад/с
Р=300 кВт Мн=2290 Н·м
Uн=440 В kФн=3,05 В·с
nн=1250 об/мин ω0=144 рад/с
Iн=750 А 1. Номинальное ЭДС, В
Динамическое Ен= kФн·ωн=3,05·131=400
Торможение 2. Номинальное КПД
ω=ωн
![]()
Iт=1,5Iн 3. Сопротивление якоря, Ом
![]()
![]() Ом
Ом
Rдоб. -? 4. Сопротивление добавочное, Ом
Ест. и тормозящие ![]() Ом характеристики
Ом характеристики
№2 Этот же ДПТ, но режим противовключения
ω=ωн
Iт=1,5Iн
![]()
№3 ДПТ при пуске
U=Uн
Iпуск=2,5Iн
![]()
Регулирование ДПТ.
 1)
введение резистора в цепь якоря
1)
введение резистора в цепь якоря
ω=ω0-Δω, где Δω – перепад скорости;
↑R → ω0=const, Δω↑, → ω↓
Регулирование ω оценивается;
1) диапазоном регулирования D=ωmax/ ωmin;
2) стабильностью скорости;
3) плавностью регулирования;
4) направлением регулирования;
5) допустимой нагрузкой;
Оценка:
1) диапазон регулирования небольшой (2…3);
2) капитальные затраты не большие;
3) потери Р и переход ЭП электроэнергии и её стоимость существенны.
2) изменение потока
 а)
б)
а)
б)
УВ – управляемый выпрямитель
![]()
Ф↓→ ω0↑ Iкз=U/R – const
↓Mкз=kФ↓Iкз
Фн>Ф1>Ф2
Оценка:
1) диапазон регулирования 3…4
2) стабильность большая;
3) регулирование вверх от основания характеристики;
4) потери Р невелики;
5) М≠const, I=const;
6) плавность регулирования.
3) изменение Uна якоре
U↓→ω0↓; Δω=const; ω↓
Оценка:
1) высокая плавность;
2) регулирование вниз от основания характеристики;
3) Мдоп=Мн;
4) основной способ регулирования ЭП;
5) высокая стабильность.
![]()
4) Импульсный метод
регулирование осуществляется изменением U, Ф/R резистора в цепи якоря;
R – периодически замыкают/размыкают ключ 1
 1
замыкают, γ=1, → естественная характеристика 2;
1
замыкают, γ=1, → естественная характеристика 2;
1 размыкают, γ=0, → искусственная характеристика 3;
 0<γ<1
→ механические характеристики располагаются между 2 и 3(4)
0<γ<1
→ механические характеристики располагаются между 2 и 3(4)
![]()
Ф – при γ=1 ключ замкнут, по ОВ течет Iн, → естественная характеристика; при γ=0 ключ разомкнут, Iв и Ф↓, → искусственная характеристика; 0<γ<1 → промежуточные характеристики.
Uя – якорь периодически включается к источнику Uс; ключ замкнут →Iя под действием Uc, разомкнут → Iс под действием ЭДС самоиндукции.
|| - режим прерывного I
![]() -
для прямолинейных участков.
-
для прямолинейных участков.
Раздел 3. ЭП С ЭД ПЕРЕМЕННОГО ТОКА.
Асинхронный двигатель
![]() Самый
массовый вид ЭП.
Самый
массовый вид ЭП.
MTF – крановый (для металлического производства) с фазным ротором
MTH – крановый (для металлического производства)
MTKF, MTKH – с короткозамкнутым ротором.
4А, 5А, А2, АО2 – общесерийные.
Схемы включения АД:
Обмотку Р проводят к обмотке статора (Ад в электрических отношении подобен трансформатору).
![]() -
приведенное значение.
-
приведенное значение.
R1=Rс+Rдоб1 – активное значения цепи Статора.
![]() –
активное значения цепи Ротора.
–
активное значения цепи Ротора.
X1, ![]() – индуктивные сопротивления фазной
ОС, ОР.
– индуктивные сопротивления фазной
ОС, ОР.
![]() –
индуктивное фазное КЗ (из схемы замещения АД)
–
индуктивное фазное КЗ (из схемы замещения АД)
![]() -
ряд синхронных скоростей, об/мин
-
ряд синхронных скоростей, об/мин
|
р |
1 |
2 |
3 |
4 |
|
n |
3000 |
1500 |
1000 |
750 |
![]() ,
рад/с
,
рад/с
![]()
n0 – скорость вращения магнитного поля статора;
n – скорость вращения поля ротора.
Механические характеристики
 (*)
(*)
исследуем зависимость на
экстремум,→ ![]() , →получаем две максимальные точки:
Мк, sк –
КРИТИЧЕСКИЕ.
, →получаем две максимальные точки:
Мк, sк –
КРИТИЧЕСКИЕ.
(+) – s >0 (двигательный режим)
(-) – s <0 (генераторный режим)
Чаще применяют более удобную формулу механической характеристики:
Где α=R1/R2 – это уточненная формула Клосса.
Если ω→ +∞, s→ -∞, то М→0
ω→ -∞, s→ +∞, то М→0
Вывод: ось скорости является асимптотой механической
характеристики. Для построения механической характеристики по паспортным данным
используют упрощение: R1=0. Получаем:
 - упрощенная формула Клосса.
- упрощенная формула Клосса.
![]()
где ![]() -
перегрузочная способность
-
перегрузочная способность
Рабочий участок характеристики (прямолинейный0 можно построить по двум точкам (ω0, М=0, s=0) и (ωн, Мн, sн).
Характерные точки:
1) М=0, s=0, ω=ω0 – точка идеального Х.Х.;
2) М=М н, s=1, ω=0 – КЗ/пуск;
3) Мкд, sкд; Мк2, sк2 – критические точки;
4) s→±∞, ω→±∞, → М→0
1) Угловая номинальная скорость, рад/с
ωн=2πnном/60=2·3,14·1465/60=153,3
2) Угловая скорость идеального Х.Х., рад/с
ω0=2πf1/р=2·3,14·50/2=157
3) Номинальный момент, Н·м
Мном=Рном/ ωном=15000/153,3=98
4) Номинальное скольжение
sном=(ω0-ωн)/ω0=(157-153,3)/157=0,025
5) Критический момент АД, Н·м
Мк=λм·Мном=2,3·98=225
6) Критическое скольжение
![]()
7) Момент. Н·м

АД может работать во всех энергетических режимах, которые определяются значением и знаком скольжения:
1) s=0, ω=ω0 – режим идеального Х.Х.;
2) s=1, ω=0 – режим КЗ;
3) 0<s<1, 0<ω<ω0 – двигательный режим;
4) s<0, ω>ω0 – генераторный режим;
5) s>1, ω<0 ( при ω0>0) – противовключение;
6) динамическое торможение – ОС отключается от сети и подключается к источнику постоянного тока.
Пуск АД с фазным ротором
Осуществляется введением R2доб в цепь ротора. Величина R2доб влияет на вид механической характеристики, на Мпуск,
ток ротора ![]() и статора I1.
и статора I1.
![]()
![]()
![]()
R2доб↑,→М=const – «+», sк↑, ω0=const;→ ![]() ↓,
Мn↑
- «+»
↓,
Мn↑
- «+»
Можно подобрать R2доб таким образом, что sк=1, т.е. ![]() . Если и дальше
увеличивать R2доб, то Mп будет падать. Ступени пускового R
рассчитывают так, чтобы броски I(M) были одинаковыми.
. Если и дальше
увеличивать R2доб, то Mп будет падать. Ступени пускового R
рассчитывают так, чтобы броски I(M) были одинаковыми.
Расчет пусковой диаграммы
1. Задаются моментом переключения М2, М2=(1,1…1,3)Мс и числом ступеней Z
2. Определяют кратность моментов при пуске:
 ,
где
,
где ![]()
3. Определяют пиковый момент при пуске:
М1=γМ2
4. Если М1≤(0,8…0,9)Мк, строят пусковую диаграмму.
5. Если не выполняется вышеуказанные условия, то задаются другими значениями.
Пуск АД с КЗ ротором
1. Прямое включение в сеть.
2. Переключение со «звезды» на «треугольник» (Iп↓ в 3 раза)
3. автотрансформаторный пуск.
4. Ад с улучшенными пусковыми свойствами.
Торможение АД.
Противовключение – режим, при котором поле статора и ротора вращаются в разные стороны.
1. Работающий ЭД нужно быстро затормозить.
Пусть Ад работает в точке «а». Изменили порядок следования фаз,→магнитное поле статора стало вращаться в другую сторону со скоростью – ω0, →АД переходит на характеристику, соответствующую переключению фаз.
У ротора инерция, →АД переходит с той же скоростью ω1 на продолжение характеристики, соответствующей ω0.
Момент становится тормозным; под действием Мт АД интенсивно тормозится. В точке «с» Ад нужно отключить от сети, иначе будет реверс.
![]() 2.
Тормозной спуск грузов АД.
2.
Тормозной спуск грузов АД.
Ад включен на подъем.
![]()
АД будет разгоняться в точку «f» ( в сторону большего момента) на опускание груза.
![]()
![]() , Мс>М, разгон до
точки «f», т.к. в точке «f» Мс=М,→
, Мс>М, разгон до
точки «f», т.к. в точке «f» Мс=М,→
![]() . Груз будет опускаться с постоянной
скоростью. АД работает в точке «f» со скоростью –ω2
. Груз будет опускаться с постоянной
скоростью. АД работает в точке «f» со скоростью –ω2
Рекуперативное торможение.
Осуществляется, если ротор вращается с большой скоростью, но в ту же сторону (т.е. в сторону вращения магнитного поля статора).
1. Тормозной спуск грузов.
АД включают на опускание
груза (точка «а»). ![]() →разгон в двигательном
режиме по «ab». В точке «b» М=0,
→разгон в двигательном
режиме по «ab». В точке «b» М=0, ![]() (+),
↑ω→ω>ω0,→генераторное торможение, т.к. М сменил знак и стал Мт.
В точке с М=Мс, →АД вращается со скоростью –ω1.
(+),
↑ω→ω>ω0,→генераторное торможение, т.к. М сменил знак и стал Мт.
В точке с М=Мс, →АД вращается со скоростью –ω1.
2. При переходе 2-х скоростного Ад с высокой скорости на низкую.
![]() .
АД работает в точке «а» с нагрузкой Мс. АД переключили, сделав р=2.
.
АД работает в точке «а» с нагрузкой Мс. АД переключили, сделав р=2.
Динамическое торможение
Отключают от сети ~I и подключают к источнику постоянного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.