Расчёт параметров модулей машины
![]() кгс
кгс
Pk - внешняя нагрузка;
mН и mВ - cила тяжести наружной и внутренней пружин соответственно, кгс.
![]() мм
мм
b - ширинаопорной части шарнирного узла;
Dн - диаметр внутренней поверхности наружной пружины, мм;
Dв - диаметр наружной поверхности внутренней пружины, мм;
 мм;
мм;
dП - диаметр пальца шарнира;
![]() мм;
мм;
hP – номинальная высота поперечного сечения;
dH- диаметр витка наружной пружины, мм;
tH - шаг витков наружной пружины, мм;
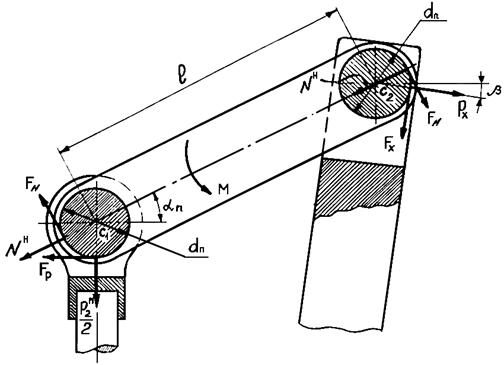
Сила Рx является результирующей силой сопротивления повороту захватных рычагов в исходное положение, образующейся в результате их взаимодействия с двухрядной пружиной рессорного комплекта тележки.
 кгс;
кгс;
Px1 – в случае, когда захватные рычаги опираются на внутренние поверхности проемов шарнирной зоны корпуса пневмопривода.
LH – длина наружной части рычага;
LB – длина внутренней части рычага;
fT - коэффициент трения скольжения (сталь по стали).
Px2 – в случае, когда захватные рычаги опираются на палец;
Минимальное значение результирующей силы достигается при втором варианте, когда захватные рычаги опираются на палец.
![]()
F0 - сила сопротивления, образующаяся в уплотнении поршня при его перемещении в исходное положение, кгс.
Dт - диаметр типового пневмоцилиндра, соответствующий размерам уплотнительной манжеты по ГОСТ 6678, см;
m - коэффициент трения скольжения для новых уплотнительных манжет;
bМ - высота поверхности манжеты, контактируемая с внутренней поверхностью пневмоцилиндра, см;
qм - удельное давление, создаваемое упругостью уплотнительной манжеты, кгс/см;
nм- количество уплотнительных манжет, установленных на поршне.
На первом этапе расчётов F0 принимаем равным 0.
Находим критическое значение силы ![]() необходимое для
разжима захватными рычагами внутренней пружины рессорного комплекта и
обеспечивающее восстановление манипуляционной системы захватной головки в
исходное положение.
необходимое для
разжима захватными рычагами внутренней пружины рессорного комплекта и
обеспечивающее восстановление манипуляционной системы захватной головки в
исходное положение.
![]() кгс;
кгс;
![]() -
сила
упругости пружины при рабочей деформации;
-
сила
упругости пружины при рабочей деформации;
an - угол наклона распорных рычагов при рабочем положении рычажного механизма;
Расчет пневмопривода
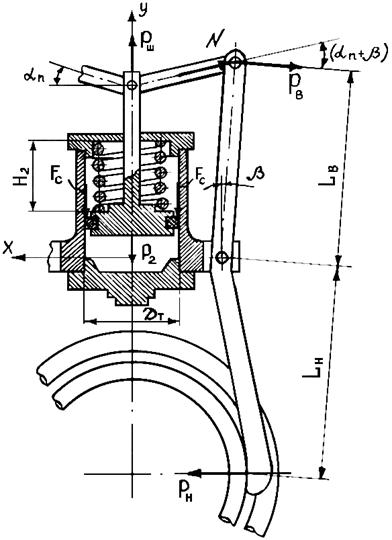 |
Определим силу РЦ, развиваемую штоком пневмопривода:
 кгс;
кгс;
Определим ориентировочный диаметр Dopпневмоцилиндра:
 мм
мм
Pa - давление сжатого воздуха, кгс/мм2.
Fc – сила сопротивления, образующаяся в уплотнении поршня при его перемещении в рабочее положение (принимаем равной нулю);
Из таблицы “Эксплуатационные характеристики уплотнительных манжет по ГОСТ 6678” найдём высоту поверхности контакта манжеты с цилиндром:
bм = 1,8 мм;
Определим расчётный диаметр пневмоцилиндра:
![]() , где
, где
![]() ;
;  ;
;
![]() ;
; ![]() РЦ + P2.
РЦ + P2.
Из этого квадратного уравнения находим корни:
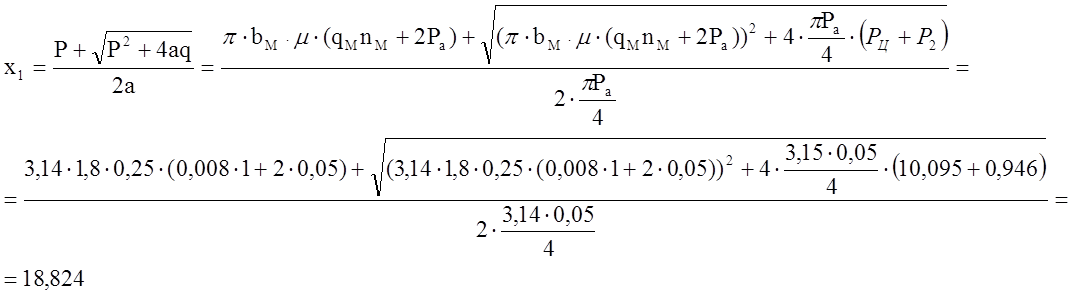
Таким образом, расчётный диаметр пневмоцелиндра равен 18,824 мм.
Выбираем диаметр типового пневмоцелиндра 22 мм.
Соблюдая требования по компактному размещению кинематических звеньев в корпусе захватной головки, относительно диаметра Dт пневмоцилиндра конструктивно примем размеры:
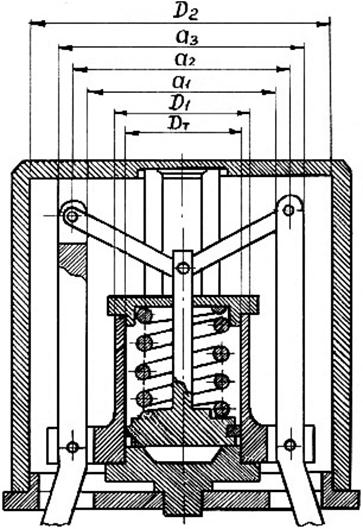 |
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
D2 на первом шаге расчёта примем равным нулю.
К1 ; К2 ; К3 – принятые конструктивно размеры, устанавливающие расстояние между элементами, мм.
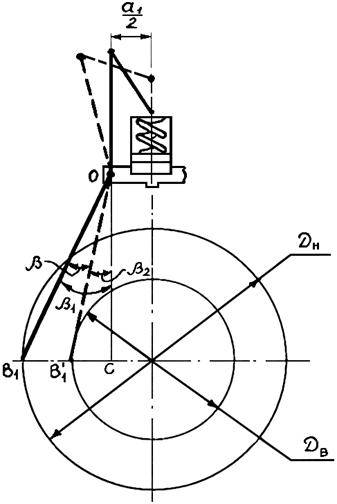
Найдем угол b поворота захватных рычагов.
 |


![]()
Определим длину l распорного рычага:
 мм.
мм.
Определим угол am наклона распорных рычагов при исходном положении кинематических звеньев:

Определим ход hш -поршня пневмопривода:
 мм.
мм.
Р’2 -сила упругости возвратной пружины, эквивалентная сопротивлению поворота захватных рычагов, кгс;
Р’’2 -сила упругости возвратной пружины, эквивалентная сопротивлению перемещения распорных рычагов, кгс;
F0 -сила сопротивления, образующаяся в уплотнении поршня при его перемещении в исходное положение, кгс.
 кгс
кгс
 |
 кгс
кгс
![]() кгс
кгс
![]() кгс
кгс
Определим Fcсилусопротивления, образующуюся в уплотнении поршня при его перемещении в рабочее положение:
![]() кгс
кгс
Определим силу Рш, развиваемую штоком пневмопривода:
 кгс
кгс
![]() мм.
мм.
|
Fo |
P2 |
hШ |
DТ |
PШ |
l |
LН |
LВ |
D1 |
a1 |
a2 |
a3 |
D2 |
PX1 |
PX2 |
PI2 |
PII2 |
FC |
|
кгс |
кгс |
мм |
мм |
кгс |
мм |
мм |
мм |
мм |
мм |
мм |
мм |
мм |
кгс |
кгс |
кгс |
кгс |
кгс |
|
0,249 |
0,95 |
9,6 |
22 |
14,4 |
35,4 |
200 |
65 |
30 |
50 |
66 |
82 |
92,54 |
9,45 |
5,4 |
0,48 |
0,224 |
3,36 |
Граничные значения силы упругости пружины сжатия при максимальной деформации определим с учетом установленного интервала относительно инерционного зазора для витков
 кгс
кгс
 кгс
кгс
dmax; dmin -минимальная и максимальная величины относительно инерционного зазора соответственно.
В интервале P3(min) ¸ Р3(max) для
установленного класса пружины относительно диаметра ![]() пневмоцилиндра
можно определить критическую величину наружного ее диаметра:
пневмоцилиндра
можно определить критическую величину наружного ее диаметра:
![]() мм
мм
Zk - зазор между внутренней поверхностью пневмоцилиндра и наружной поверхностью пружины (принимается с учетом конструкции и размеров передней крышки цилиндра), мм.
Принимаем:
Пружина I класса, 2 разряд, №179.
P3 = 1,120 кгс – сила пружины при максимальной деформации
d = 0,8 мм – диаметр проволоки;
D = 10,5 мм – наружный диаметр пружины;
z1 = 0,449 кгс/мм – жёсткость одного витка;
f3 = 2,494 мм – наибольший прогиб одного витка;
Временное сопротивление sВ = 270 кгс/мм2;
Максимальное касательное напряжение при кручении t3 = 0,3×sВ = 81 кгс/мм2;
Выносливость в циклах, не менее NВ = 5×106;
Модуль сдвига для пружинной стали G = 8×103 кгс/мм2;
Плотность материала r = 8×10-10 кгс2/мм4;
Определим критическую скорость:
 мм/c
мм/c
n0 = 1000 мм/с;
n0 -установленная из технологических условий работы механизма скорость перемещения подвижного конца пружины,
nкр –критическая скорость перемещения подвижного конца пружины, при которой от сил инерции происходит соударение витков.
Соударение витков происходить не будет.
Средний диаметр пружины:
![]() мм;
мм;
Индекс пружины:
Индекс пружины больше 4. Проблемы, связанные с технологическим производством возникать не будут.
![]() раз
раз
Aт -программа ремонта тележек;
nт -количество двухрядных пружин в рессорном комплекте одной тележки;
kt-количество манипуляций с двухрядной пружиной (kт = 2 -снять с тележки и поставить на тележку);
Tc -период эксплуатации захватной головки;
nг -количество используемых захватных головок при ремонте тележек.
Сила упругости пружины при предварительной деформации:
![]() кгс
кгс
d0 -коэффициент, учитывающий силы и моменты сопротивления, образующихся в шарнирных соединениях манипуляционной системы от сил тяжести кинематических звеньев.
Жесткость пружины:
 кгс/мм
кгс/мм
h -рабочий ход пружины, равный по величине ходу поршня пневмопривода h =hш, мм.
Число рабочих витков пружины:
 =7
=7
Уточненная жесткость пружины:
 кгс/мм;
кгс/мм;
Полное число витков пружины:
![]()
![]() -количество
опорных витков с учетом величины зашлифованной дуги их окружности.
-количество
опорных витков с учетом величины зашлифованной дуги их окружности.
Деформация пружины соответственно при предварительном, рабочем и максимальном нагружении:
 мм;
мм;
 мм;
мм;
 мм;
мм;
Высота пружины при максимальной деформации:
![]() мм;
мм;
Высота пружины в свободном состоянии:
![]() мм;
мм;
Высота пружины при предварительной и рабочей деформации соответственно:
![]() мм;
мм;
![]() мм;
мм;
Шаг витков пружины:
![]()
Длина проволоки для изготовления пружины:
![]() мм
мм
|
AT |
TC |
DT |
F0 |
hШ |
zK |
d0 |
v0 |
vКР |
NB |
NФ |
G |
t3 |
r |
n1 |
|
шт. |
лет |
мм |
кгс |
мм |
мм |
мм/с |
мм/с |
кгс/мм2 |
кгс/мм2 |
кгс2/мм4 |
||||
|
5000 |
10 |
22 |
0,249 |
9,6 |
4 |
1,2 |
1000 |
3476 |
5×106 |
466667 |
8×103 |
81 |
8×10-10 |
9 |
|
n2 |
d |
t |
D |
L |
H0 |
P1 |
H1 |
P2 |
H2 |
P3 |
H3 |
fV |
c |
|
|
мм |
мм |
мм |
мм |
мм |
кгс |
мм |
кгс |
мм |
кгс |
мм |
||||
|
2 |
0,8 |
3,294 |
10,5 |
279,36 |
23,9 |
0,299 |
19,231 |
0,95 |
9,09 |
1,12 |
6,4 |
0,287 |
12,125 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.



