Санкт-Петербургский Государственный Университет
Информационных Технологий Механики и Оптики
Кафедра Систем Управления и Информатики
Нелинейные и оптимальные системы
Лабораторная работа № 7
«Точная линеаризация и стабилизация выхода. Попятный синтез и стабилизация каскадных систем».
|
Выполнил: |
студент группы 4148
|
|
Проверил: |
|
Санкт-Петербург
2008 г.
Цель работы: для заданных систем вычислить алгоритм точной линеаризации и стабилизировать систему с заданными параметрами качества переходного процесса. Стабилизировать каскадную систему методом попятного синтеза (backstepping).
Исследование:
1. Точная линеаризация и стабилизация выхода.
В нормальной форме модель внешней динамики нелинейной системы представляется в виде:
 (1)
(1)
Заданные системы имеют единичную относительную степень, следовательно:
 (2)
(2)
В общем виде алгоритм
точной линеаризации системы, приведенной к нормальной форме записывается так:
![]() , где (3)
, где (3)
![]()
![]()
В этом случае система представима в эквивалентной линейной форме:
![]() (4)
(4)
Или с учетом
относительной степени для заданных систем: ![]() ,
где
,
где ![]() - новое управляющее воздействие.
- новое управляющее воздействие.
Полученная линеаризованная модель системы стабилизируется с помощью алгоритма управления
![]() (5)
(5)
Определим параметры
управляющего воздействия, обеспечивающие заданные показатели качества. Для
полученной линеаризованной модели можно записать![]() .
.
Для ![]() получаем
получаем ![]()
Полное описание регулятора для исходной системы имеет вид:
![]() , где
, где ![]() (6)
(6)
Для заданных систем ![]()
Рис.1- Типовая схема моделирования.
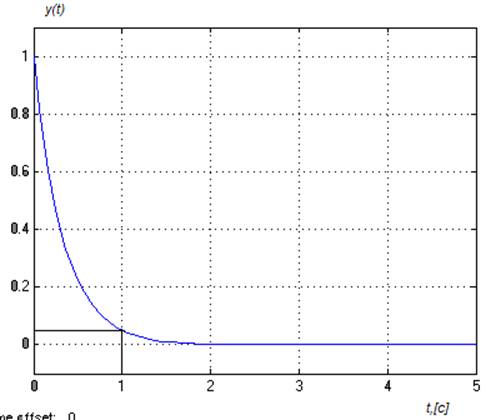
Рис.2- переходные процессы системы.
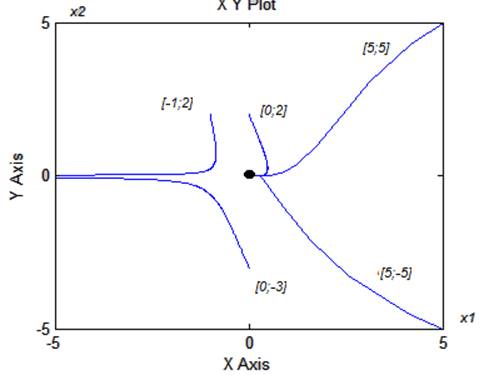
Рис.3-Фазовый портрет ОУ1.
В случае, если нуль-динамика заданной системы обладает свойством устойчивости и полноты в некоторой окрестности, то замкнутая система, приводимая к нормальной форме, локально асимптотически устойчива по выходу.
2. Попятный синтез и стабилизация каскадных систем.
В заданном объекте управления:
 (8)
(8)
Возьмем
![]()
Тогда система представима как каскадная в форме:
 (9)
(9)
Или (10)
 (11)
(11)
·
В
предположении, что ![]() - желаемое
управление, найдем виртуальное управление, обеспечивающее стабилизацию
подсистемы (10):
- желаемое
управление, найдем виртуальное управление, обеспечивающее стабилизацию
подсистемы (10):
![]() (12)
(12)
Для заданной системы стабилизирующее воздействие имеет вид:
![]() (13)
(13)
В этом случае модель (10) примет вид ![]() И при
И при ![]() замкнутая
система асимптотически устойчива. Для обеспечения времени переходного процесса
1с выберем
замкнутая
система асимптотически устойчива. Для обеспечения времени переходного процесса
1с выберем ![]() .
.
Введем в рассмотрение ошибку:
![]() (14)
(14)
Тогда подсистема (10) записывается в виде:
![]() (15)
(15)
Продифференцируем (14):
![]() (16)
(16)
где ![]()
Для заданной системы (10)-(11)
![]() (17)
(17)
![]() (18)
(18)
При выборе алгоритма стабилизации ошибки в виде:
![]() (19)
(19)
Получим линейную модель ошибки ![]()
Для обеспечения требуемого времени
переходного процесса стабилизации ошибки ![]() выберем
выберем
![]()
В конечном виде для заданного ОУ
стабилизирующее управление записывается в виде:
![]() (20)
(20)
Рис.4- Схема моделирования каскадной системы.
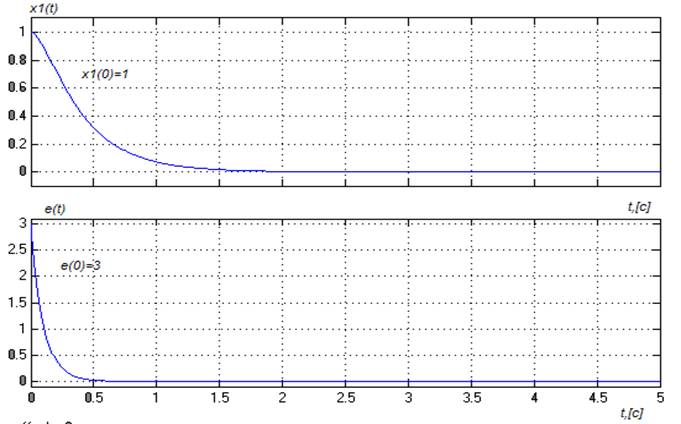
Рис.5- Переходные процессы стабилизированной замкнутой каскадной системы.
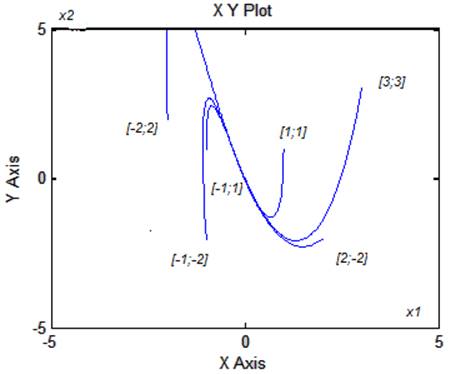
Рис.6-Фазовый портрет замкнутой системы.
Вывод: в ходе работы были получены стабилизирующие регуляторы для заданных объектов управления. Была изучена методика точной линеаризации нелинейных систем и метод попятного синтеза для каскадных систем. Результаты проведенного моделирования показали, что полученные регуляторы обеспечивают выполнение задачи управления с требуемыми параметрами переходных процессов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.