

Санкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра Автоматики и Вычислительной Техники
Отчет
о лабораторной работе №5
Дисциплина: “Моделирование систем управления”
Тема: “Моделирование детерминированных процессов”.
Выполнил студент 4081/1
группа Ф.И.О.
Преподаватель _________________
подпись Ф.И.О.
Санкт-Петербург
2007
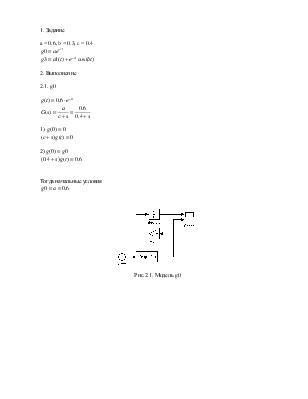
1. Задание
a = 0.6, b = 0.3, c = 0.4
![]()
![]()
2. Выполнение
2.1. g0
![]()
![]()
1) ![]()
![]()
2)![]()
![]()
Тогда начальные условия
![]()
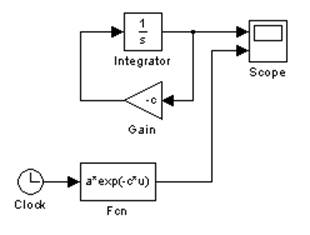
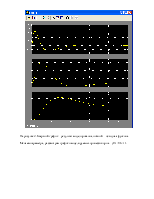
Рис.2.1. Модель g0
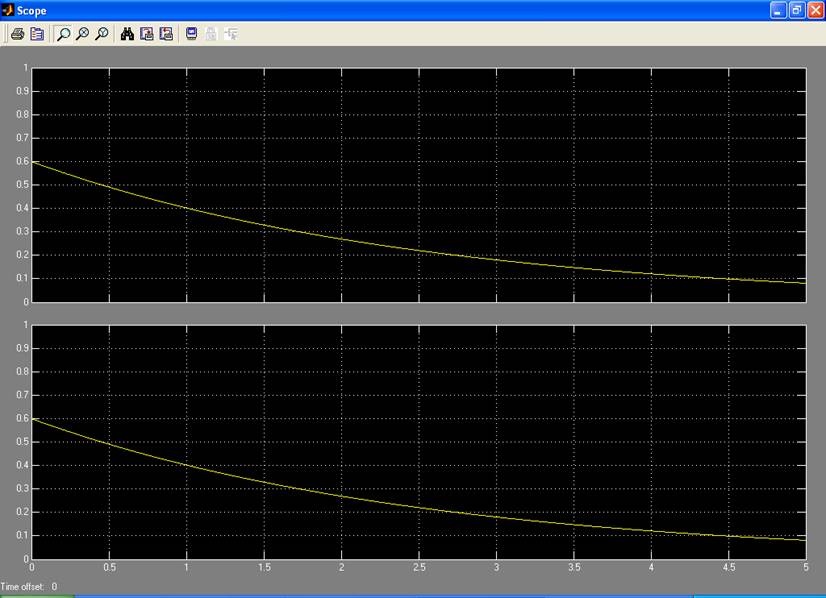
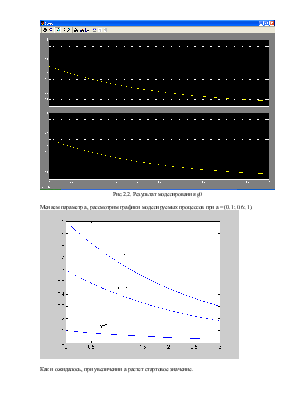
Рис.2.2. Результат моделирования g0
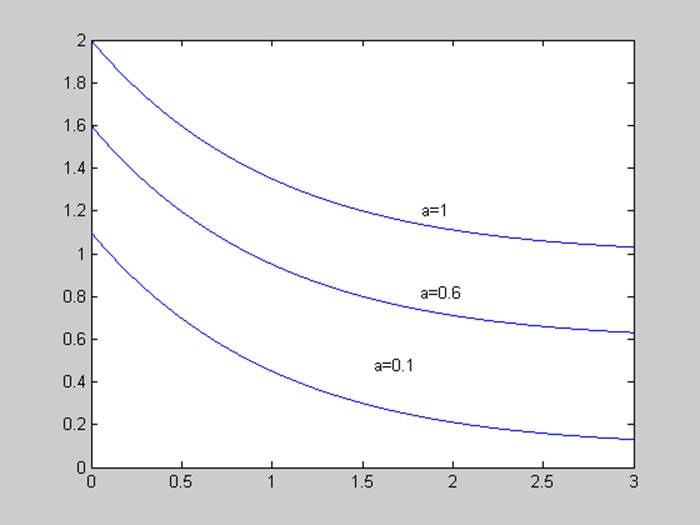
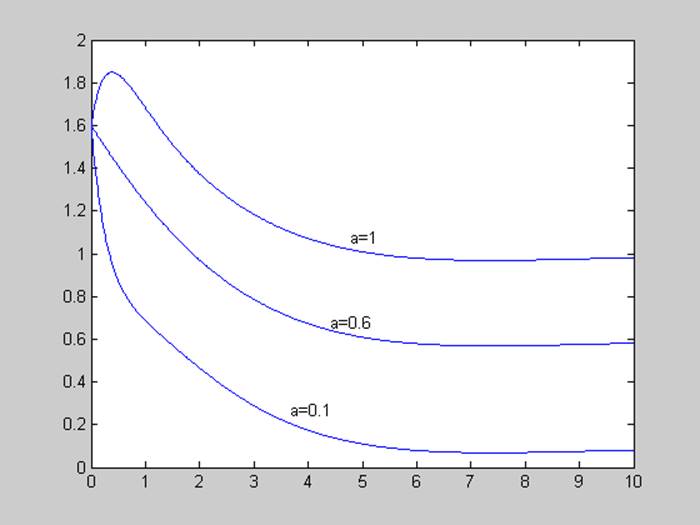
Меняем параметр а, рассмотрим графики моделируемых процессов при а = (0.1; 0.6; 1).
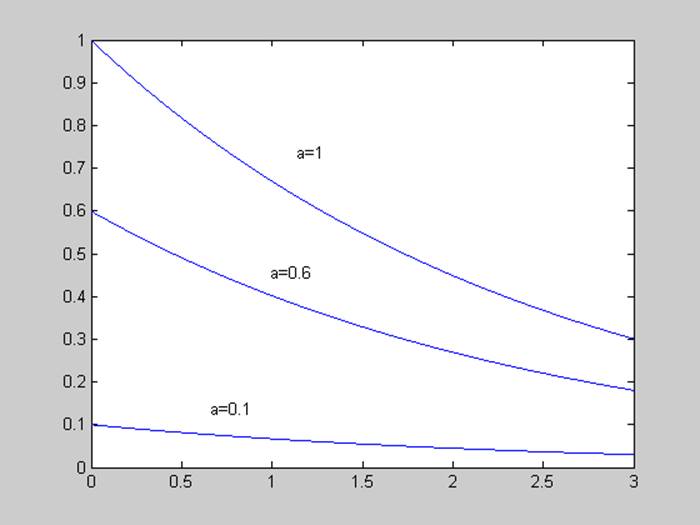
Как и ожидалось, при увеличении а растет стартовое значение.
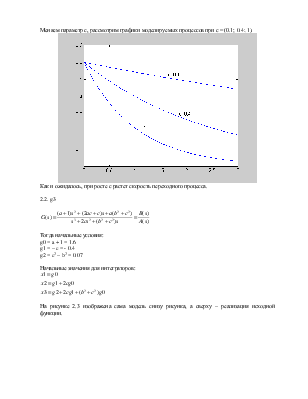
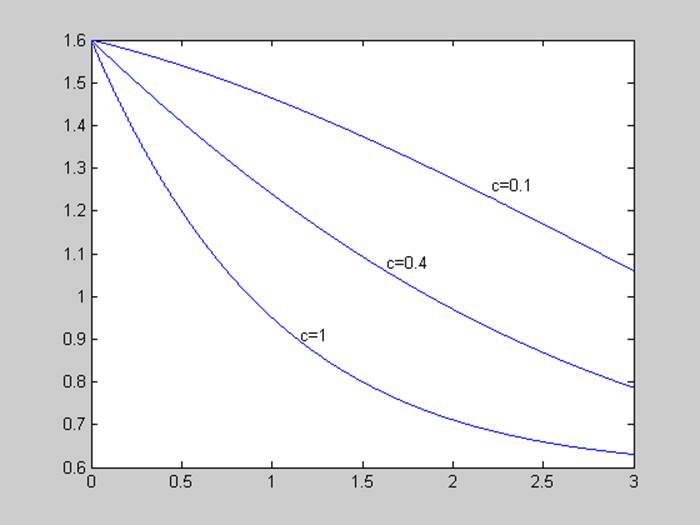
Меняем параметр с, рассмотрим графики моделируемых процессов при с = (0.1; 0.4; 1).
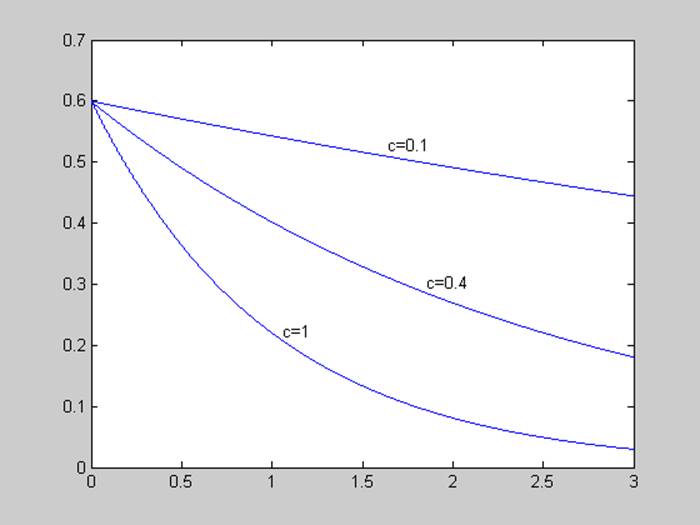
Как и ожидалось, при росте с растет скорость переходного процесса.
2.2. g3
![]()
Тогда начальные условия:
g0 = a + 1 = 1.6
g1 = – c = - 0.4
g2 = c2 – b2 = 0.07
Начальные значения для интеграторов:
На рисунке 2.3 изображена сама модель снизу рисунка, а сверху – реализация исходной функции.
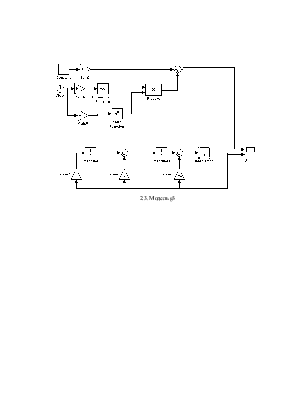
2.3. Модель g3
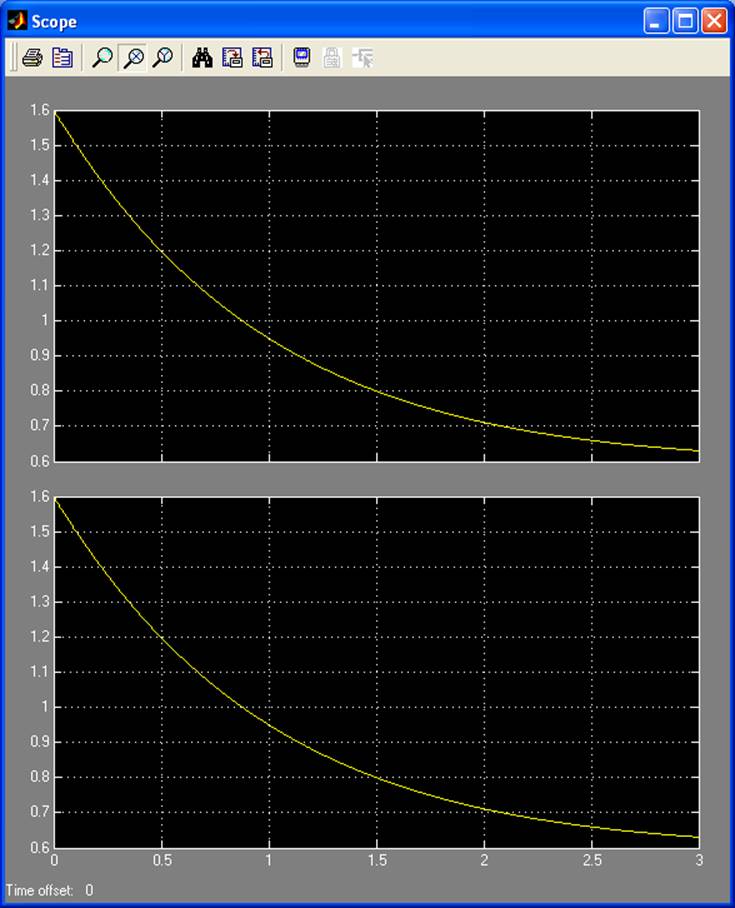
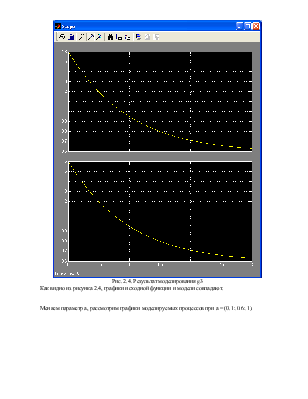
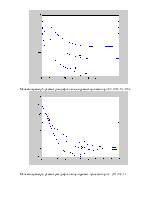
Рис. 2.4. Результат моделирования g3
Как видно из рисунка 2.4, графики исходной функции и модели совпадают.
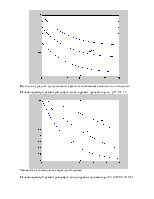
Меняем параметр а, рассмотрим графики моделируемых процессов при а = (0.1; 0.6; 1).
Как видно из рисунка, при увеличении а растет становившееся значение, что и ожидалось.
Меняем параметр с, рассмотрим графики моделируемых процессов при с = (0.1; 0.4; 1).
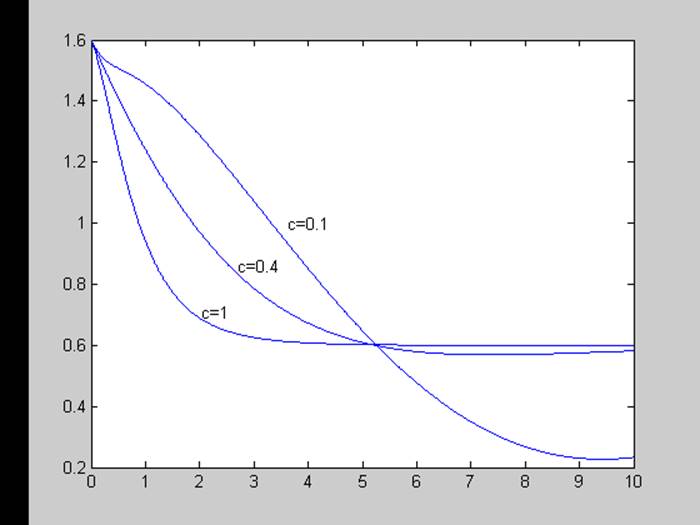
Чем меньше с, тем медленнее переходный процесс.
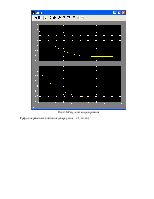
Меняем параметр b, рассмотрим графики моделируемых процессов при b = (0.025; 0.25; 0.5).
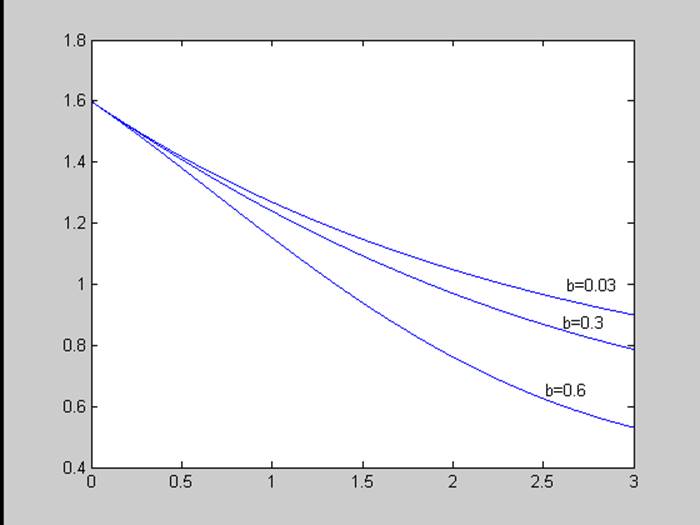
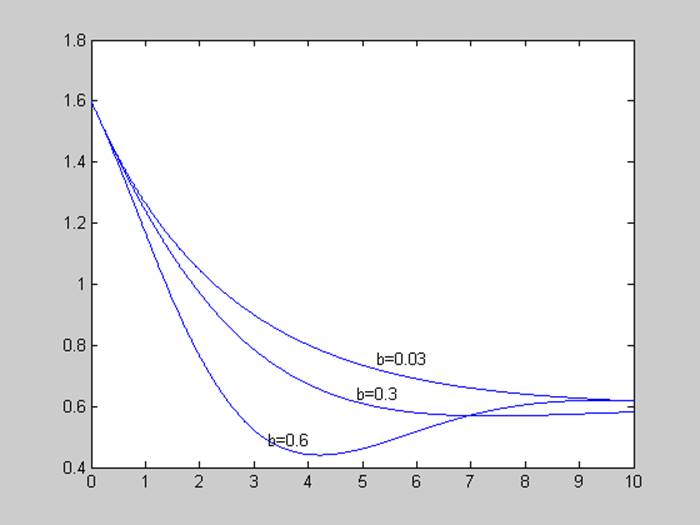
Чем больше b, тем ниже установившееся значение.
2.3. Линейно – параметрическая модель.
Вводим полином
![]()
Следовательно, m1 = 6, m2 = 11, m3 = 6
Тогда
![]()
![]()
Обратное преобразование Лапласа для получения σ(t) делалось в MATLAB
Команды:
a=0.25;b=0.25;c=1
m1=6;m2=11;m3=6
syms s
ilaplace(((a+1)*s^2+(2*a*c+c)*s+a*(b^2+c^2))/(s^3+m1*s^2+m2*s+m3))
pretty(ans)
Результат:
1191 479 87
---- exp(-3 t) - --- exp(-2 t) + --- exp(-t) = σ(t)
200 100 200
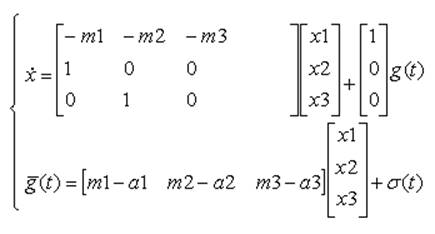
Структура дифференциальной динамической модели
детерминированного процесса ![]() g3(t):
g3(t):
Модель:
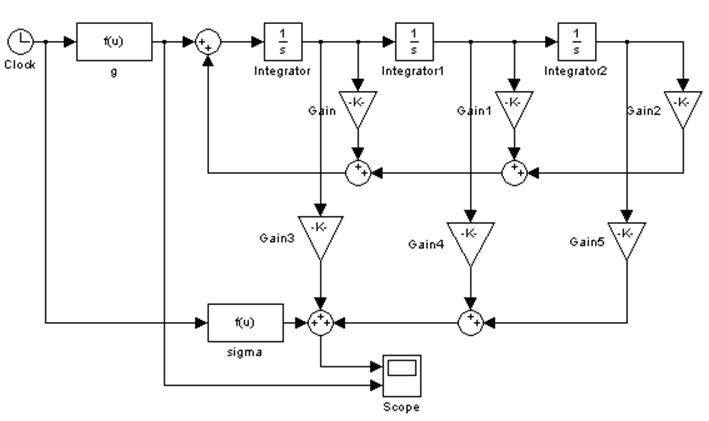
Рис. 2.5. Линейно – параметрическая модель g3
Результат:
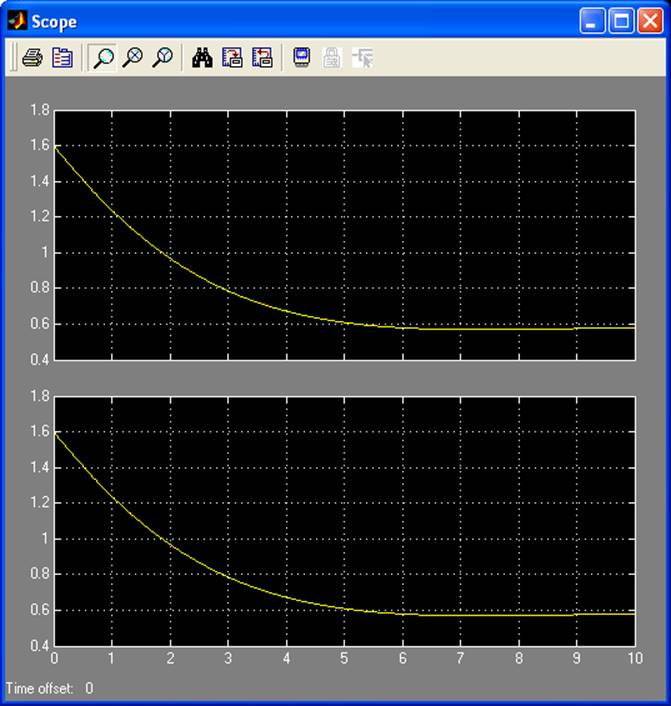
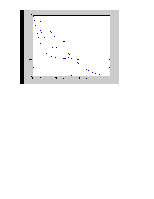
Рис. 2.6. Результат моделирования
График переменных состояния (сверху вниз – х1, х2, х3):
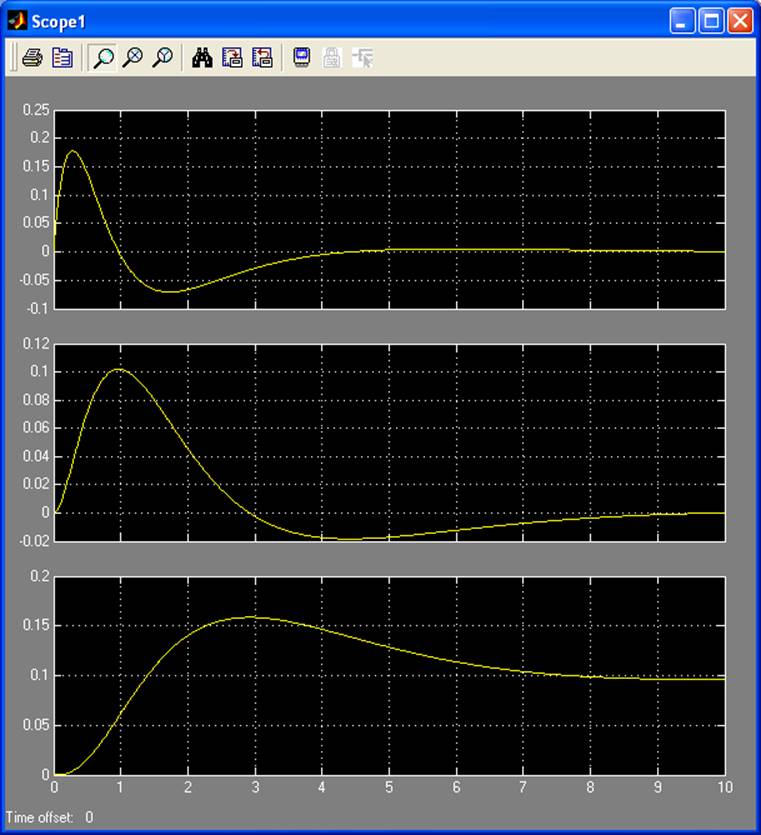
На рисунке 2.6 верхний график – результат моделирования, нижний – исходная функция.
Меняем параметр а, рассмотрим графики моделируемых процессов при а = (0.1; 0.6; 1).
Меняем параметр b, рассмотрим графики моделируемых процессов при b = (0.03; 0.3; 0.6).
Меняем параметр с, рассмотрим графики моделируемых процессов при с = (0.1; 0.4; 1).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.