





















средняя длина кодовой комбинации для построенного кода
![]()
μср=0.167·3+0.131·3+0.102·3+0.102·3+0.092·3+0.085·4+0.074·4+0.067·4+
+0.064·4+0.064·5+0.028·5+0.026·5+0.014·6+0.014·6=3.7
Согласно теореме Шеннона при кодировании можно достичь средней длины
μmin=H(A)/log22=H(A)=3.6
μср≠μmin
Таким образом, построенный код не является оптимальным.
Вероятность появления нуля (априорная вероятность)
![]()
p0=0.445
Вероятность появления единицы
р1=1-р0=1-0.445=0.555
Значит, энтропия кода
HK=-(p0log2p0+p1log2p1)
HK=-(0.445log0.445+0.555log0.555)=0.99125 бит
Избыточность кода
![]()
где HKmax=log2m=log22=1
![]()
Скорость передачи информации по каналу без помех
![]()
где τ=0.7·10-6с – длительность посылки.
![]()
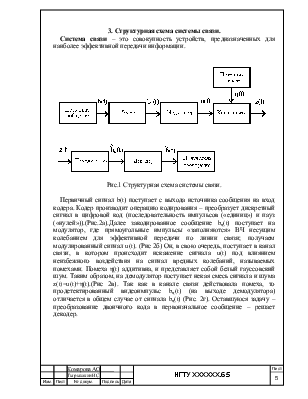
6. Описание процесса принятия приемником решения
при приеме сигнала.
В системах передачи информации с пассивной паузой, использующих бинарный код, задача анализа сигнала сводится к тому, что решающее устройство должно определить есть сигнал (принята «1») или нет (принят «0»).
Модулированный сигнал u(t), проходя через канал связи, подвергается воздействию помехи. На выходе получаем сигнал z(t), который является смесью переданного сигнала с помехой (z(t)=u(t)+η(t)).Задача демодулятора состоит в том, чтобы по наблюдаемому колебанию z(t) принять решение о переданном сигнале, такое, чтобы обеспечить максимальную верность. Правило принятия решения – это закон преобразования z(t) в bц(t).
При приеме сигнала используется пороговый обнаружитель. Принимаемая смесь сигнала с шумом z(t), сравнивается с определенным порогом zп и, если происходит превышение порога, то считается, что передана «1», иначе «0».
Из-за помех приемник может дать ошибочный результат, и вместо передаваемого символа мы получим другой. Эти ошибки можно классифицировать:
1. Ошибка первого рода (ложная тревога): при передаче элемента 0 принято решение о том, что передан элемент 1; условная вероятность такого события обозначается p01.
2. Ошибка второго рода (не обнаружение сигнала): при передаче элемента 1 принято решение о том, что передан элемент 0; условная вероятность такого события обозначается p10.
Тогда средняя вероятность ошибки pош=p0·p10+p1·p01.
В данном задании помеха аддитивная и представляет собой гауссовский белый шум с нулевым математическим ожиданием. Он характеризуется нормальной плотностью распределения вероятности
где σ2 – дисперсия шума.
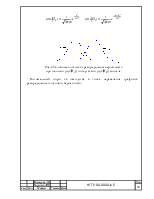
Далее рассматривается распределение случайной величины z в зависимости от того, есть ли сигнал (ω(z|H1), (распределение при гипотезе Н1) или нет (ω(z|H0)-распределение при гипотезе Н0.
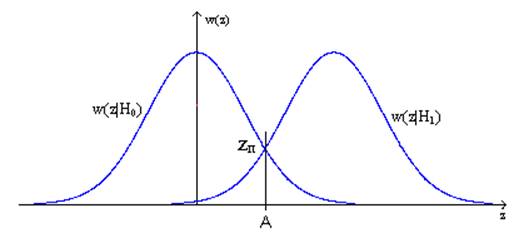
Рис.3 Условные плотности распределения вероятности
при наличии (ω(z|H1)) и отсутствии (ω(z|H0)) сигнала.
Оптимальный порог zп находится в точке пересечения графиков распределения плотности вероятности.
7. Расчет характеристик системы согласно п.1.2.3.
7.1. Когерентный прием.
Когерентный прием – прием сигнала при условии, что форма сигнала на интервале наблюдения точно известна, неизвестен лишь сам факт наличия или отсутствия сигнала в наблюдаемом колебании.
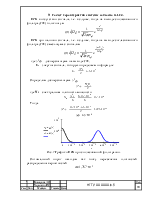
Плотность распределения вероятности (ПРВ) в отсутствии сигнала
ПРВ при наличии сигнала
Рис4. Графики функций плотностей вероятности для мгновенных значений сигнала z.
Оптимальный порог по критерию идеального наблюдателя (когда потери, связанные с различными ошибками, принимаются равными друг другу, приемник обеспечивает минимальную среднюю вероятность ошибки рош) определяем как точку пересечения графиков р0 ω(z|H0) и р1 ω(z|H1)
zп=4.97
р01=0.021
р10=0.02
![]() , i≠j
, i≠j
В нашем случае всего два символа 0 и 1, значит, i и j принимают значения либо 0 либо 1.
рош=р0р01+р1р10
рош=0.445∙0.021+0.555∙0.02=0.02
![]()
где I(X,Y) – взаимная информация.
![]()
где p(xi,yi)=p(xi)p(yi|xi) – совместная вероятность,
p(yi|xi) – условная вероятность.
В нашем случае существуют четыре совместные вероятности: р(1,0)=р1р10=0,0111
р(1,1)=р1р11=0,549
р(0,0)=р0р00=0,441
р(0,1)=р0р01=0,0093
где р00=1-р01=0,9906
р11=1-р10=0,9889
На выходе – 1: p(y=1)=p1p11+p0p01=0.5583


Тогда, скорость передачи информации
![]()
7.2 Некогерентный прием.
Некогерентный прием – прием сигнала, параметры которого известны не полностью, в частности, рассматривается задача приема сигнала со случайной начальной фазой.
ПРВ в отсутствии сигнала
ПРВ при наличии сигнала
где I0 – модифицированная функция Бесселя нулевого порядка
Рис.5 Графики ПРВ при некогерентном приеме.
Оптимальный порог определяем как точку пересечения плотностей распределения вероятностей.
zп=6.13
р01=0,044
р10=0,041
рош=р0р01+р1р10
рош=0,042
Скорость передачи информации при некогерентном приеме вычисляем аналогично когерентному приему
![]()

Преобразовав, получим

Тогда
![]()
Сравним результаты, полученные при когерентном и некогерентном приемах.
Таблица 2.
|
Способ приема |
Вероятность ошибки первого рода р01 |
Вероятность ошибки второго рода р10 |
Средняя вероятность ошибки рош |
Скрость передачи информации V(X,Y) |
|
Когерентный |
0.021 |
0.02 |
0.02 |
1.24·106бит/с |
|
Некогернтный |
0.0444 |
0.041 |
0.042 |
1.06·106бит/с |
Как видно из таблицы 2 при когерентном приеме сигнала вероятности
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.