нормы – граничные значения областей состояния контролируемого параметра.
1
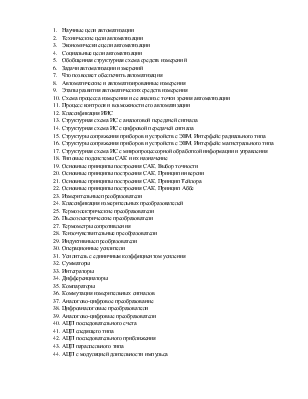
– Подсистема коммутации и связи – служит для непо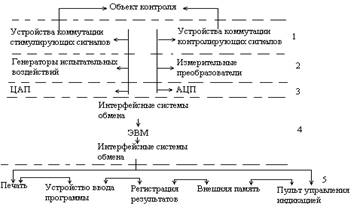 средственного
подключения системы к объекту контроля. Она может осуществляться с помощью
проводных линий или использования высокоточного радиоканала. В состав
подсистемы входят: устройства коммутации контролируемых и стимулирующих
сигналов. 2 - Система измерительных преобразователей и генераторов
испытательных воздействий – содержит преобразователи различных физических
величин, нормализатор их выходных сигналов в унифицированные электрические
сигналы, а также генераторы испытательных сигналов, формирующие воздействия на
объект контроля. 3 – Подсистема согласующих преобразователей - состоит
из АЦП для сигналов напряжения и тока и частотно-цифровых преобразователей для
частотных сигналов, а также обратных преобразователей ЦАП для формирования
испытательных воздействий. 4 – Операционная подсистема – представляет
собой специализированную ЭВМ, которая может быть выполнена на микропроцессорных
комплексах БИС (большие интегральные схемы). 5 – Подсистема ввода-вывода
– включает устройства, обеспечивающие связь оператора с системой; устройства
регистрации инфо, внешние долговременные запоминающие устройства; средства
подготовки и ввода программ. Принципы сопряжения ЭВМ с др. подсистемами
основаны на применении стандартный каналов передачи данных.
средственного
подключения системы к объекту контроля. Она может осуществляться с помощью
проводных линий или использования высокоточного радиоканала. В состав
подсистемы входят: устройства коммутации контролируемых и стимулирующих
сигналов. 2 - Система измерительных преобразователей и генераторов
испытательных воздействий – содержит преобразователи различных физических
величин, нормализатор их выходных сигналов в унифицированные электрические
сигналы, а также генераторы испытательных сигналов, формирующие воздействия на
объект контроля. 3 – Подсистема согласующих преобразователей - состоит
из АЦП для сигналов напряжения и тока и частотно-цифровых преобразователей для
частотных сигналов, а также обратных преобразователей ЦАП для формирования
испытательных воздействий. 4 – Операционная подсистема – представляет
собой специализированную ЭВМ, которая может быть выполнена на микропроцессорных
комплексах БИС (большие интегральные схемы). 5 – Подсистема ввода-вывода
– включает устройства, обеспечивающие связь оператора с системой; устройства
регистрации инфо, внешние долговременные запоминающие устройства; средства
подготовки и ввода программ. Принципы сопряжения ЭВМ с др. подсистемами
основаны на применении стандартный каналов передачи данных.
12 Классификация ИИС:
ИИС представляет собой функционально-объединенную совокупность СИ нескольких физических величин и вспомогательных устройств и предназначается для получения измерительной инфо об исследуемом объекте в условиях его функционирования или хранения. В зависимости от назначения ИИС делят на: системы сбора измерительной инфо от исследуемого объекта (ИС); система автоматического контроля (САК) предназначена для контроля за работой разного рода машин или тех. процесса; система технической диагностики (СТД) предназначена для выявления технических неисправностей изделия; система распознавания (идентификации) образов (СРО) предназначена для определения принадлежности объекта к 1 из заранее выделенных классов объекта; телеизмерительная система (ТИС) предназначена для сбора измерительной инфо с объектов, удаленных на большие расстояния. По способу передачи инфо: радиальные; магистральные; микропроцессорные.
13 Структурная схема ИС с аналоговой передачей сигнала:
Данная
структурная схема предназначена для 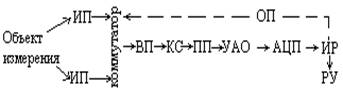 измерения
небольшого количества величин с относительно невысоким быстродействием.
Выходные электрические сигналы с измерительных преобразователей (ИП) ч/з
коммутатор поочередно поступают на передающий (выходной) преобразователь (ВП),
согласующий выходы ИП с каналом связи (КС). Приемный преобразователь (ПП)
выделяет информационный сигнал, который после первичной обработки и усиления на
устройстве аналоговой обработки (УАО) поступает в АЦП и после преобразования на
индикатор результатов измерения (ИР). Оценку полученной инфо и выработку
управляющих воздействий осуществляет оператор (ОП). РУ - регистрирующее
устройство.
измерения
небольшого количества величин с относительно невысоким быстродействием.
Выходные электрические сигналы с измерительных преобразователей (ИП) ч/з
коммутатор поочередно поступают на передающий (выходной) преобразователь (ВП),
согласующий выходы ИП с каналом связи (КС). Приемный преобразователь (ПП)
выделяет информационный сигнал, который после первичной обработки и усиления на
устройстве аналоговой обработки (УАО) поступает в АЦП и после преобразования на
индикатор результатов измерения (ИР). Оценку полученной инфо и выработку
управляющих воздействий осуществляет оператор (ОП). РУ - регистрирующее
устройство.
14 Структурная схема ИС с цифровой передачей сигнала:
 УЦО – устройство
цифровой обработки; ОАИК – объект автоматизации измерения и контроля. Передача
по каналам связи инфо в цифровой форме отличается большой помехозащищенностью.
Системы АЦП, выполненные по интегральной технологии позволяют конструктивно
объединить АЦП с каждым измерительным преобразователем объекта. Это дает
возможность отказаться от аналогового коммутатора, вносящего искажения и на
приемной стороне осуществлять ряд операций обработки с помощью УЦО, такие как
усреднение, сравнение, вычитание, накопление и хранение инфо. Для организации
управления процессом измерения вводится логическое управляющее устройство с
жестким алгоритмом, автоматически задающим длительность такта измерения,
управление регистрацией и цифровой обработкой результатов измерений.
УЦО – устройство
цифровой обработки; ОАИК – объект автоматизации измерения и контроля. Передача
по каналам связи инфо в цифровой форме отличается большой помехозащищенностью.
Системы АЦП, выполненные по интегральной технологии позволяют конструктивно
объединить АЦП с каждым измерительным преобразователем объекта. Это дает
возможность отказаться от аналогового коммутатора, вносящего искажения и на
приемной стороне осуществлять ряд операций обработки с помощью УЦО, такие как
усреднение, сравнение, вычитание, накопление и хранение инфо. Для организации
управления процессом измерения вводится логическое управляющее устройство с
жестким алгоритмом, автоматически задающим длительность такта измерения,
управление регистрацией и цифровой обработкой результатов измерений.
15 Структуры сопряжения приборов и устройств с ЭВМ.
Интерфейс радиального типа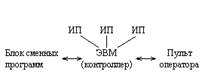
Радиальная структура – система, имеющая интерфейс радиального типа. Состоит из отдельных приборов, измеряющих значения ограниченного числа исследуемых физических величин. Передача инфо от прибора к ЭВМ происходит под управлением специальной программы и требует создания для каждой из них специфического интерфейса, т.к. каждый прибор соединен с ЭВМ индивидуальным кабелем. Недостатки: ЭВМ должна иметь столько входов, сколько к ней подключено устройств; громоздкость структуры; ограничение возможностей перестройки и наращивания системы.
16 Структуры сопряжения приборов и устройств с ЭВМ. Интерфейс магистрального типа:
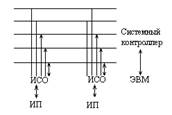 Магистральная
структура
характеризуется наличием сквозного канала передачи данных, равноправием всех
подключенных устройств и асинхронным принципом обмена. Каждое из подключенных
устройств может быть передатчиком инфо, приемником или контроллером. Это
позволяет на основе ограниченной номенклатуры приборов и устройств создавать
разнообразные системы.
Магистральная
структура
характеризуется наличием сквозного канала передачи данных, равноправием всех
подключенных устройств и асинхронным принципом обмена. Каждое из подключенных
устройств может быть передатчиком инфо, приемником или контроллером. Это
позволяет на основе ограниченной номенклатуры приборов и устройств создавать
разнообразные системы.
Канал передачи данных распределяет инфо м/у отдельными элементами системы. Системный контролер координирует работу отдельных элементов системы и осуществляет изменение форматов данных их команд в процессе обмена с ЭВМ. Шинная система линий связи передает управляющие и информационные
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.