Пусть λi – простые и вещественные корни характеристического полинома. В этом случае любую матрицу n×n можно привести с помощью некоторого преобразования к диагональной матрице A =diag{l1,l2,…,ln}:
 .
.
Характеристический полином есть определитель характеристической матрицы pE –A =diag{p-li}. В случае диагональной матрицы он равен произведению элементов главной диагонали.
Такой базис удобен тем, что в нем уравнения системы распадаются на уравнения n независимых подсистем первого порядка. В развернутой форме уравнения системы имеют вид:
Видно, что здесь xi(t) не зависит от xj(t)(i≠j). Вследствие этого упрощается расчет процессов в системе.
Для
системы с одним входом и одним выходом ![]() и
передаточная функция системы
и
передаточная функция системы
Таким образом, диагональная форма матрицы А соответствует системе, состоящей из параллельно соединенных подсистем первого порядка (апериодических или интегрирующих звеньев).
Для
перехода от исходных уравнений состояния к уравнениям в заданной канонической
форме необходимо найти такую преобразующую матрицу Т, что для заданных матриц
А, В, С получаются уравнения с матрицами ![]() ,
,
![]() ,
, ![]() ,
имеющими требуемый канонический вид.
,
имеющими требуемый канонический вид.
При переходе к диагональной форме задается только вид
матрицы ![]() . Матрицы
. Матрицы ![]() и
и ![]() получаются
через преобразующую матрицу Т. Поэтому требуется определить матрицу перехода
Т такую, что диагональная матрица
получаются
через преобразующую матрицу Т. Поэтому требуется определить матрицу перехода
Т такую, что диагональная матрица ![]() Естественно,
что характеристические полиномы матриц А и
Естественно,
что характеристические полиномы матриц А и ![]() должны
совпадать.
должны
совпадать.
При решении этой задачи обычно используются собственные векторы матриц. Напомним, что собственным вектором некоторой матрицы А, отвечающим собственному значению λi называется такой вектор xio, для которого выполняется равенство
Axi0 = λixi0.
Как известно, собственные векторы определяются с точностью до произвольного ненулевого множителя.
Матрица приведения Т к диагональной канонической форме при простых вещественных собственных числах определяется из выражения
![]()
где xi0 – собственные векторы исходной матрицы А.
Пример. Пусть заданы уравнения состояния с матрицами

![]()
Требуется определить матрицы системы в канонической диагональной форме.
Найдем характеристический полином матрицы А:
A(p) =
Корни этого полинома (собственные числа матрицы А) равны λ1=-1, λ2=-3.
Диагональная
форма  . Нетрудно проверить, что
собственные числа этой матрицы те же, что и у исходной матрицы.
. Нетрудно проверить, что
собственные числа этой матрицы те же, что и у исходной матрицы.
Вычислим собственные векторы исходной матрицы А.
Для определения собственного вектора, соответствующего собственному числу λ1=-1 получим следующие уравнения:
x1 + x2 = 0,
3x1 + 3x2 = 0.
Примем x1 = 1. Тогда из полученной системы уравнений x2 = -1.
Следовательно, собственный вектор для λ1=-1 будет x10= [1 -1]T.
Собственный вектор, соответствующий λ1=-3 найдем из системы уравнений:
3x1 + x2 = 0,
-3x1 ‑ x2 = 0.
Выбрав значение x1 = 1, найдем x2 = -3. Значит, x20 = [1 -3]T.
В результате собственные векторы исходной матрицы А
Тогда
матрица перехода 
Обратная
матрица 
Проверкой
можно убедиться, что 
Матрица
![]() =
=![]() .
.
Структурная схема, соответствующая диагональной канонической форме, представлена на рис. 2.3.
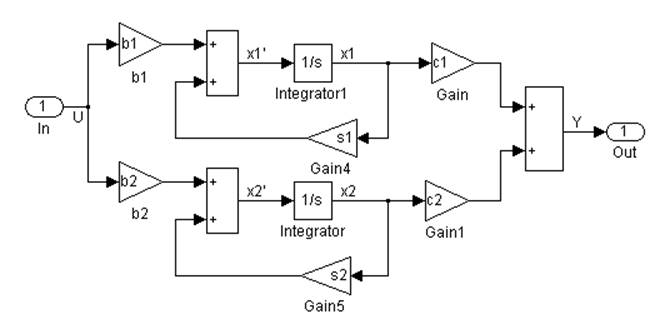
Рис. 2.3. Схема моделирования для диагональной канонической формы
Порядок выполнения этой части работы такой же, как и первой части.
Таблица 2.2
ВАРИАНТЫ ЗАДАНИЙ
для второй части работы
|
№ варианта |
W(s) |
№ варианта |
W(s) |
|
1 |
|
7 |
|
|
2 |
|
8 |
|
|
3 |
|
9 |
|
|
4 |
|
10 |
|
|
5 |
|
11 |
|
|
6 |
|
12 |
|
Контрольные вопросы
1. Какими способами можно описать динамическую систему?
2. Как можно перейти от одного способа описания к другому?
3. Какие известны канонические формы уравнений состояния?
4. Что такое преобразование подобия?
5. При каких условиях можно найти матрицу перехода от одной формы уравнений состояния к другой и как ее определить?
6. Что такое управляемость системы и как установить это свойство?
7. Что такое наблюдаемость системы и как ее установить?
8. Однозначен ли переход от уравнений состояния динамической системы к передаточной функции и обратный переход?
9. Как построить структурную модель системы по уравнениям состояния?
10. Какие функции пакета MatLab выполняют переход от описания системы в форме передаточной функции к описанию в форме уравнений состояния и обратный переход?
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.