Текущие значения параметров системы:
a1 = 0.012056
a2 = 0.013716
Значение степени устойчивости: 89.189164
Значение степени колебательности: 0.315948
Величина перерегулирования: 0 %
Время переходного процесса: 0.04 с
Амплитуда
 t,c
t,c
Рис.4.6. Переходная характеристика на выходе инерционного пропорционально дифференцирующего звена при ступенчатом входном воздействии (для шестой точки – t6).
Текущие значения параметров системы:
a1 = 0.002748
a2 = 0.114163
Значение степени устойчивости: 5.823782
Значение степени колебательности: 5.476482
Величина перерегулирования: 55 %
Время переходного процесса: 0.05 с
Первая точка (t1) является оптимальной по условиям качества переходного процесса:
k1 = 0.010141 с
T0 = 0.010125 с
Чувствительность системы к изменению параметров:
По степени устойчивости: при изменении параметров на 20% степень устойчивость изменяется на 19%.
По степени колебательности: при изменении параметров на 20% степень колебательности изменяется на достаточно малую величину (процентное сравнение невозможно в связи с номинальным значением колебательности 0).
5. Построение фазового портрета нелинейной системы, считая регулятор безынерционным звеном и полагая Wp(p)=1. Сделать выводы об устойчивости и характере процессов в системе. Построить примерный вид переходного процесса по фазовым траекториям для характерных начальных условий.
Рис.5.1. Структурная схема системы
![]() - передаточная характеристика нелинейного элемента
- передаточная характеристика нелинейного элемента
Рис. 5.2. Передаточная характеристика трехпозиционного реле с гистерезисом.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис. 5.3. Фазовый портрет нелинейной системы второго порядка.
Рис. 5.4. Переходный процесс.
6. Промоделировать нелинейную систему 2-го порядка в Simulink. Сравнить фазовые портреты, полученные расчетным способом с результатами моделирования. Ввести обратную связь по скорости и исследовать ее влияние на процессы в системе.
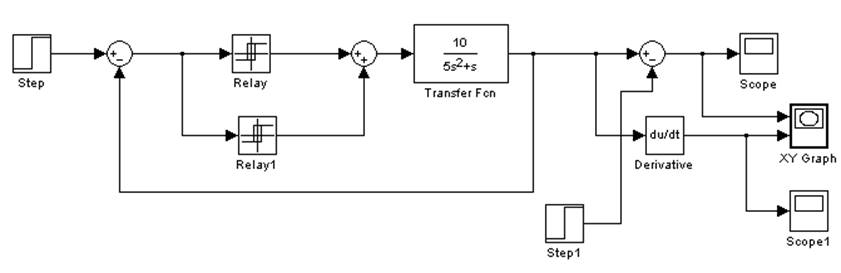
Рис. 6.1. Структурная схема нелинейной САУ в Simulink.
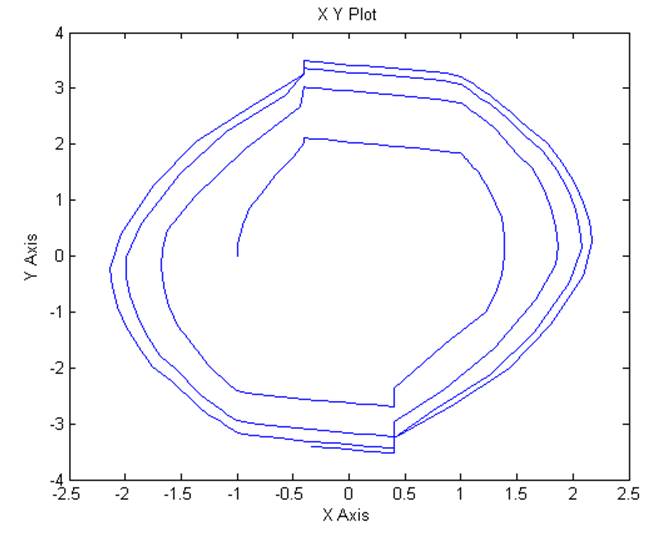
Рис. 6.2. Фазовый портрет нелинейной системы второго порядка.
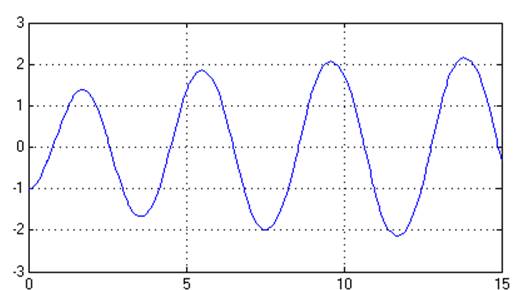
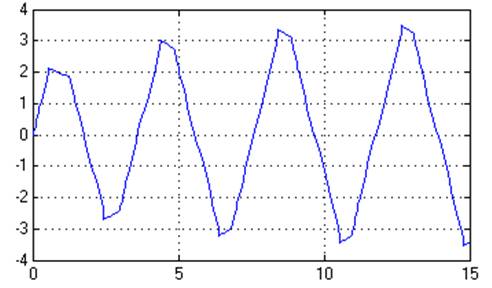
Рис. 6.3. Переходный процесс.
Можно пронаблюдать сходство фазовых портретов, полученных расчетным способом и полученных в результате моделирования.
Введем обратную связь по скорости в исследуемой системе.
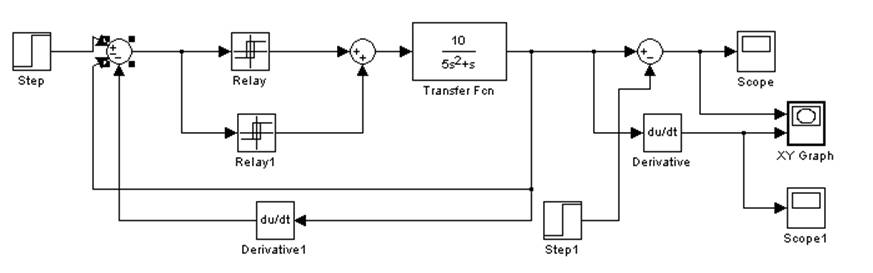
Рис. 6.4. Структурная схема нелинейной САУ с обратной связью по скорости в Simulink (1 вариант).
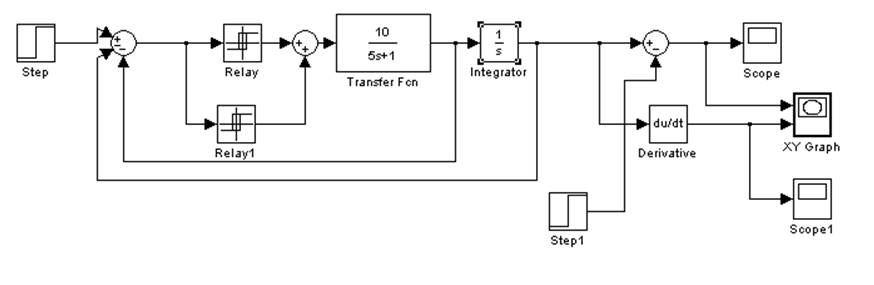
Рис. 6.5. Структурная схема нелинейной САУ с обратной связью по скорости в Simulink (2 вариант).
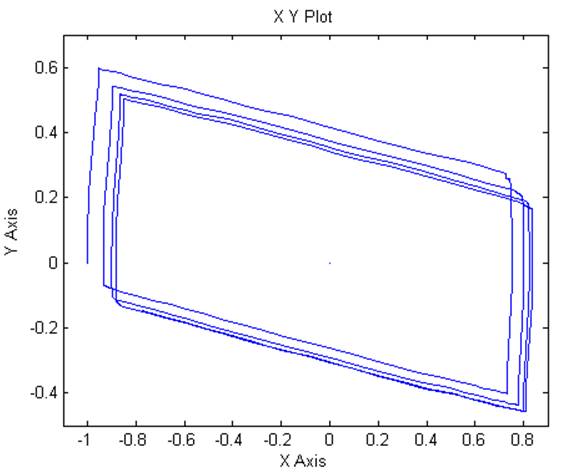
Рис. 6.6. Фазовый портрет нелинейной системы второго порядка с обратной связью по скорости (смещение нулевое).
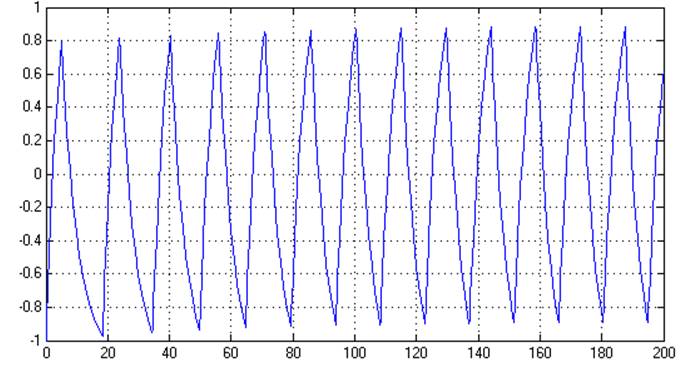
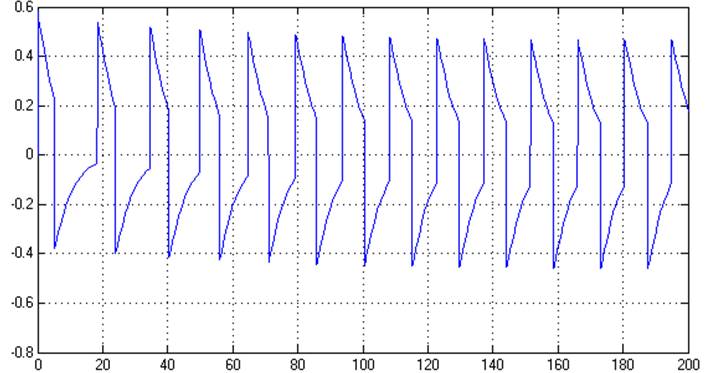
Рис. 6.7. Переходный процесс.
Установим в свойствах интегратора Исходное условие -1.
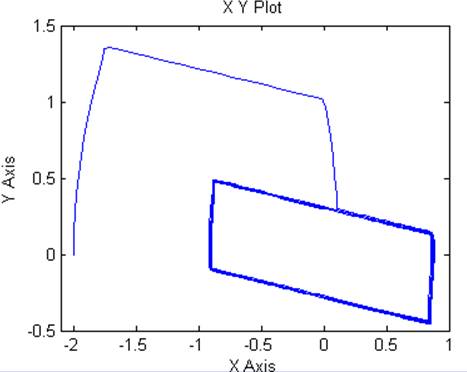
Рис. 6.8. Фазовый портрет нелинейной системы второго порядка с обратной связью по скорости.
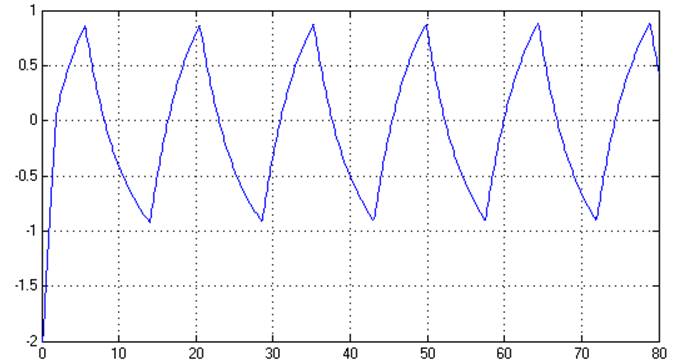
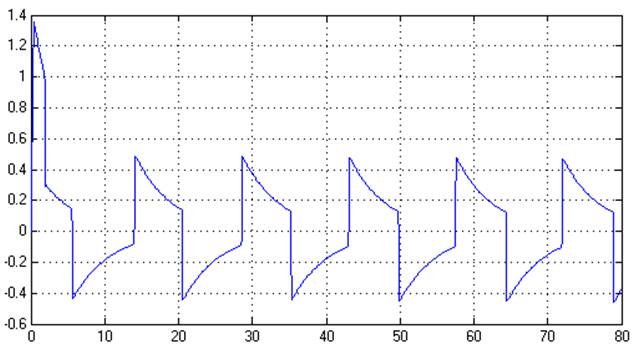
Рис. 6.9. Переходный процесс.
Установим в свойствах интегратора Исходное условие -5.
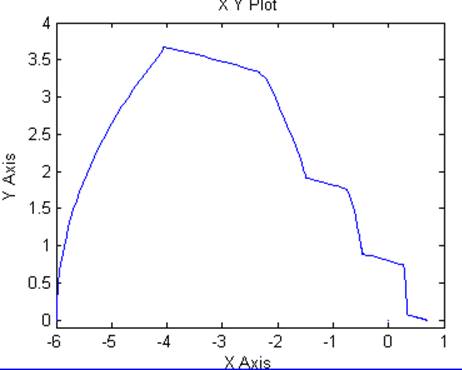
Рис. 6.10. Фазовый портрет нелинейной системы второго порядка с обратной связью по скорости.
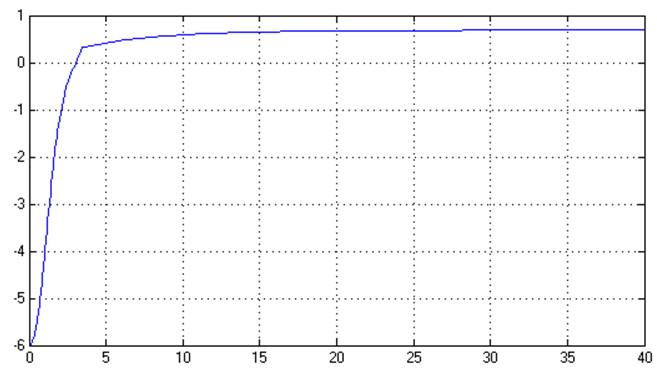
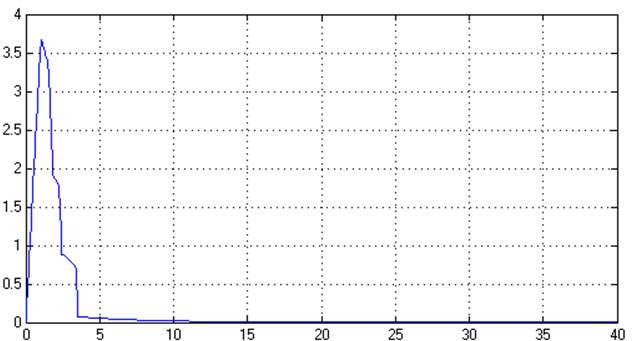
Рис. 6.11. Переходный процесс.
7. Исследование автоколебаний при включении в систему на входе регулятора нелинейного звена. Исследование условий возникновения автоколебаний (найти Tгр). Построить зависимости амплитуды и частоты автоколебаний от T0.
Передаточная функция линейной системы:
![]()
Передаточная функция нелинейного звена:
![]()
![]()
![]()
![]()
Характеристическое уравнение замкнутой системы:
![]()
![]()
![]()
Выделим в данном уравнении вещественную и мнимую часть:
![]()
 - частота
автоколебаний больше нуля, следовательно:
- частота
автоколебаний больше нуля, следовательно: ;
;
Область допустимых значений ![]() .
.
Зависимости амплитуды и частоты автоколебаний на выходе САУ от постоянной времени T0.
Таблица 7.1
|
T0, c |
wтеор, 1/c |
|
0,5 |
18,0 |
|
1 |
12,8 |
|
2 |
9,0 |
|
3 |
7,4 |
|
4 |
6,4 |
|
5 |
5,7 |
|
6 |
5,2 |
|
7 |
4,8 |
|
8 |
4,5 |
|
9 |
4,3 |
|
10 |
4,0 |
Таблица 7.2
|
T0, c |
aтеор, B |
|
0,5 |
0,41 |
|
1 |
0,49 |
|
2 |
0,58 |
|
3 |
0,64 |
|
4 |
0,69 |
|
5 |
0,73 |
|
6 |
0,77 |
|
7 |
0,80 |
|
8 |
0,82 |
|
9 |
0,85 |
|
10 |
0,87 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.