С помощью программы asymp в matlab построим ЛАХ разомкнутой системы.
Для этого введём следующие команды:
num = conv ([7500], [1 2.5])
den = conv ([1 5 6], [10 1])
wp = tf(num, den)
asymp(wp)
Передаточная функция:
7500 s + 18750
-------------------------10 s^3 + 51 s^2 + 65 s + 6
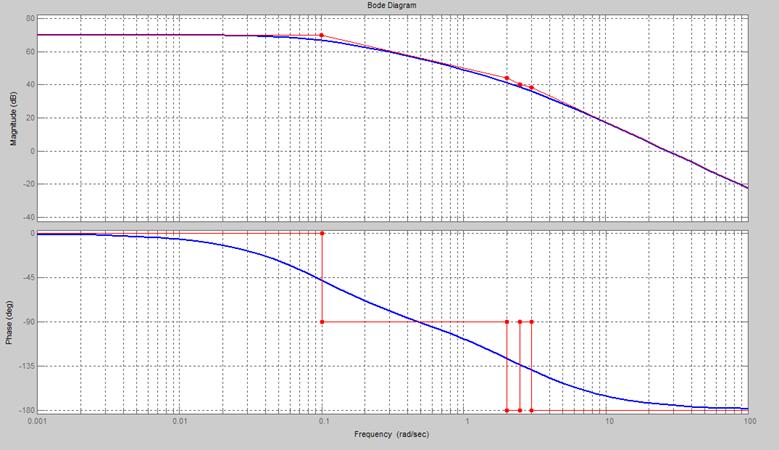
Рис. 4.1. ЛАХ разомкнутой системы.
Необходимо подобрать корректирующее звено к замкнутой системе, чтобы время переходного процесса равнялось 1с, а перерегулирование было не более 35%.
Построим желаемую ЛАХ. Частота среза определяется по формуле
![]()
В нашем случае ![]() = 4.2,
= 4.2, ![]() =1, подставляя в формулу
получаем
=1, подставляя в формулу
получаем
![]()
Границы среднечастотной асимптоты выберем из соотношений:
![]()
Сопряжение среднечастотной асимптоты с низкочастотной и высокочастотной проведём прямой с наклоном -40дБ/дек.
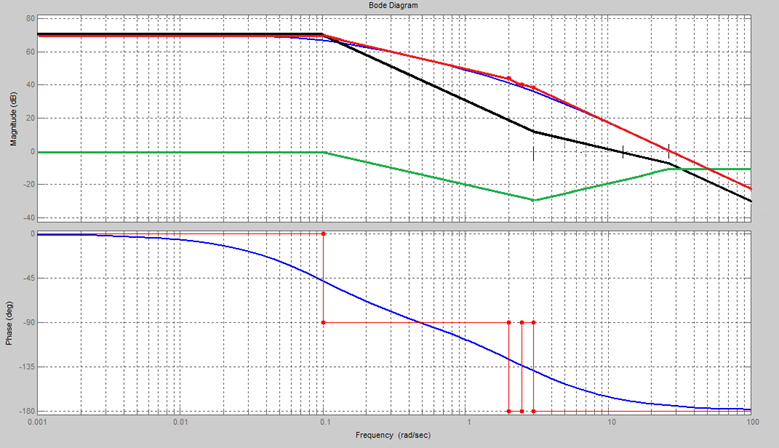
Рис.4.2. построение желаемой ЛАХ и ЛАХ корректирующего звена.
Красная – ЛАХ разомкнутой системы
Чёрная – желаемая ЛАХ
Зелёная – ЛАХ корректирующего звена. Разность между желаемой ЛАХ и ЛАХ разомкнутой системы
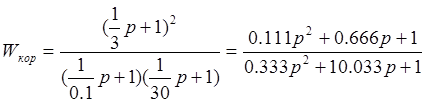
Исходя из этого графика построим передаточную функцию корректирующего звена.
Для проверки соберём схему в simulink.
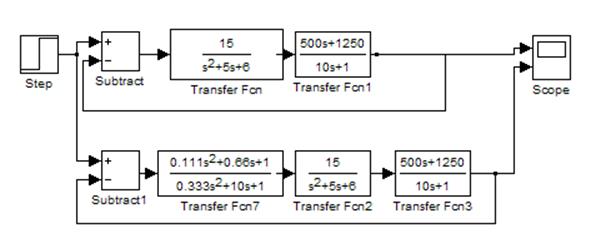
Рис. 4.3 Схема соединения с корректирующим звеном и без него
Графики переходного процесса системы с корректирующим звеном и без него приведены на рисунке.
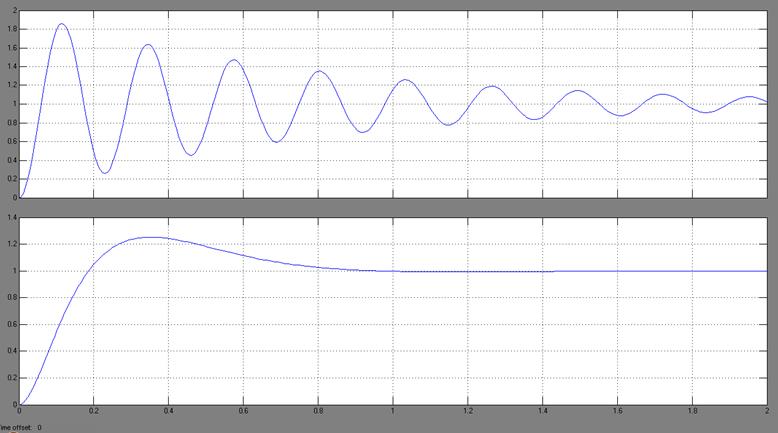
Рис. 4.4. Переходный процесс без корректирующего звена и с ним.
Как видно из графика, время переходного процесса составляет примерно 1с, перерегулирование – 25%. То есть система удовлетворяет поставленным требованиям.
5. Определение автоколебаний в системе с нелинейным звеном.
Для нелинейности типа люфт по справочнику имеем следующие коэффициенты гармонической линеаризации для данного типа нелинейности:
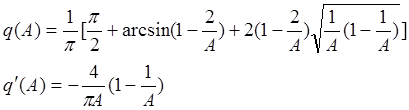
![]()
В системе имеются автоколебания, если выполняется условие
![]()
Подставим значения в это выражение и посмотрим, существуют ли положительные вещественные значения амплитуды и частоты автоколебаний.

Объединяя вещественную и мнимую часть и приравнивая обе части к нулю получаем систему:

Занося данную систему в matlab с помощью команды solve находим решения.
[A,w] =solve(7500*w*T-18750*N - 10*w^3 + 65*w, N*7500*w+18750*T-51*w^2+6)
Здесь приняты обозначения:
Т = ![]()
N = ![]()
Получается единственное решение системы:
A =
12.58514105862608303036894243063655
w =
26.873287221704498827767607118015428
То есть в данной системе существуют автоколебания. Проверим это, собрав в simulink эту систему.
Схема системы приведена на рисунке.
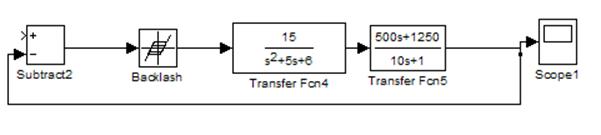
Рис.5.1. Схема с нелинейным звеном.
На рисунке приведён результат моделирования. Амплитуда и частота автоколебаний совпадает с расчётными значениями.
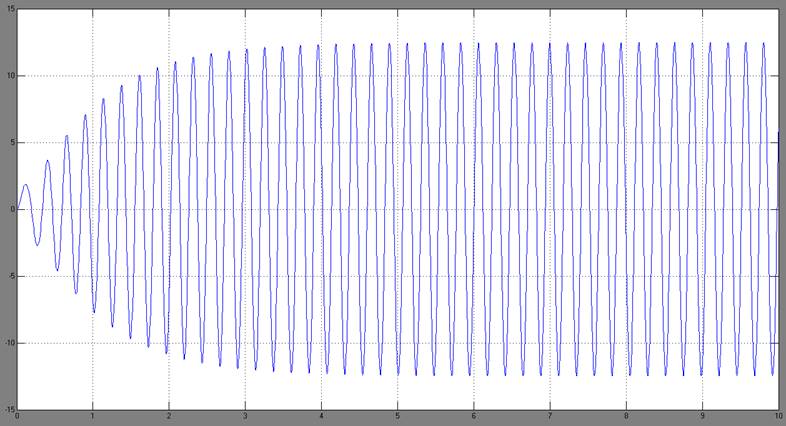
Рис.5.2. Автоколебания.
6. Определение параметров автоколебаний в системе с нелинейным звеном в зависимости от изменяемых параметров.
Обозначим первый параметр за х, второй за у, и в matlab будем решать систему, изменяя эти параметры.
[A,w] =solve(7500*w*x*T-18750*N - 10*w^3 + 60*w +5*w*y, N*7500*x*w+18750*T-50*w^2-y*w^2+6*y)
В таблицу занесём получившиеся значения амплитуды и частоты и построим соответствующие графики.
![]()
Табл. 6.1 Зависимость A и ω от первого параметра
|
y=1 |
||
|
x |
A |
ω |
|
0,5 |
140,9 |
19,5 |
|
0,6 |
27,3 |
21,14 |
|
0,7 |
18,14 |
22,7 |
|
0,8 |
15 |
24,14 |
|
0,9 |
13,4 |
25,5 |
|
1 |
12,58 |
26,87 |
|
1,5 |
11,6 |
32,8 |
|
2 |
12 |
38 |
|
2,2 |
12,2 |
39,8 |
Соответствующие графики приведены на рисунках.
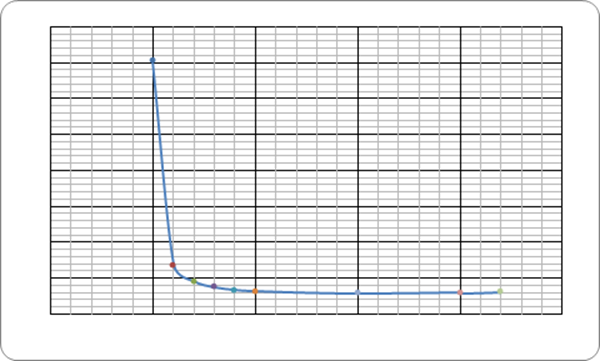
Рис.6.1. Зависимость A(x)
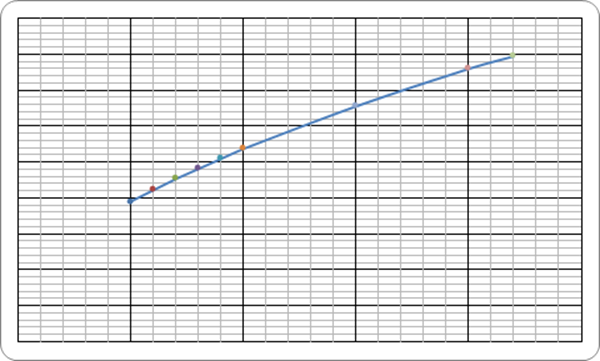
Рис.6.2. Зависимость ω(x)
Табл. 6.2 Зависимость A и ω от второго параметра
|
x=1 |
||
|
y |
A |
ω |
|
0,1 |
13 |
26,9 |
|
1 |
12,58 |
26,87 |
|
10 |
9,13 |
26,6 |
|
20 |
6,9 |
26,2 |
|
30 |
5,5 |
25,7 |
|
40 |
4,5 |
25,2 |
|
50 |
3,8 |
24,6 |
|
70 |
2,8 |
23 |
|
90 |
2,1 |
20,67 |
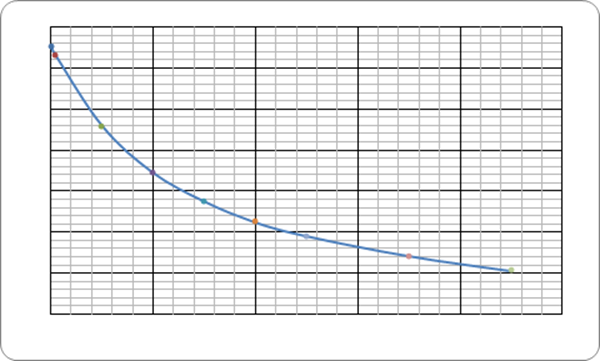
Рис.6.3. Зависимость A(у)
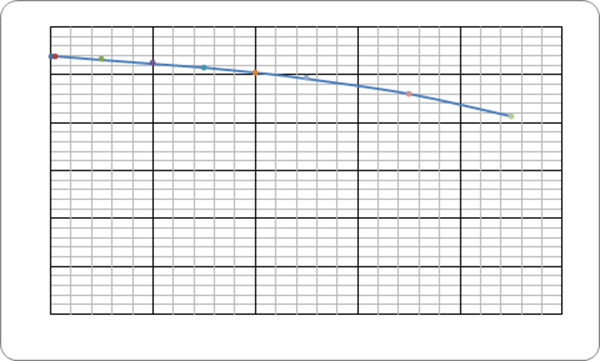
Рис.6.4. Зависимость ω(у)
При дальнейшем изменении параметров x и у в любую сторону в системе перестают происходить автоколебания. При решении соответствующей системы в matlab появляются отрицательные или комплексные значения частоты и амплитуды автоколебаний. Для примера возьмём крайнее значение x=0,5 при y = 1. Результат моделирования этой системы в simulink представлен на рисунке.
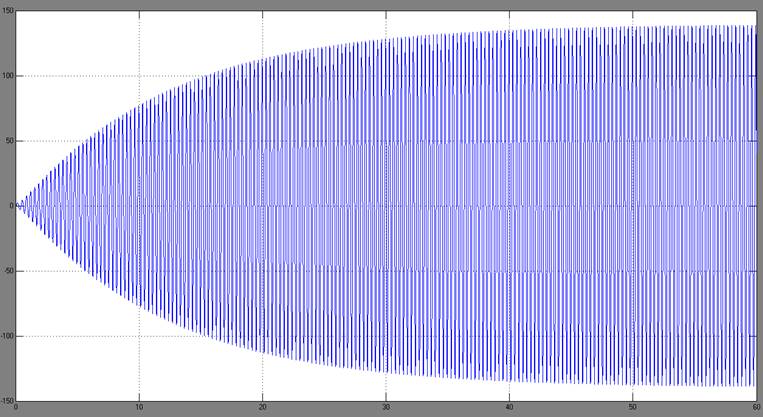
Рис.6.5. Результат моделирования при x=0,5 y=1
При значениях х=0,4 у=1 получаем в решении системы комплексные корни. Результат моделирования при данных параметрах представлен на рисунке.
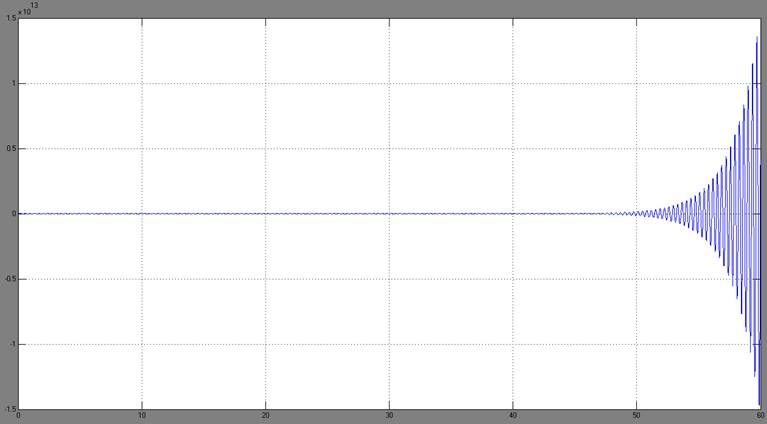
Рис.6.6. Результат моделирования при x=0,4 y=1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.