Как и ожидалось, значения, задаваемые из диалога «Изменение параметров системы» не использовались. Еще раз убедимся при других данных – в настройках регулятора зададим нули (рис.4.13), а в диалоговом окне «Изменение параметров системы» (рис.4.14) введем отличнее от нуля данные. Результат работы системы при данных параметрах представлен на рис.4.15.

Рис.4.13. Настройки библиотечного ПИД-регулятора
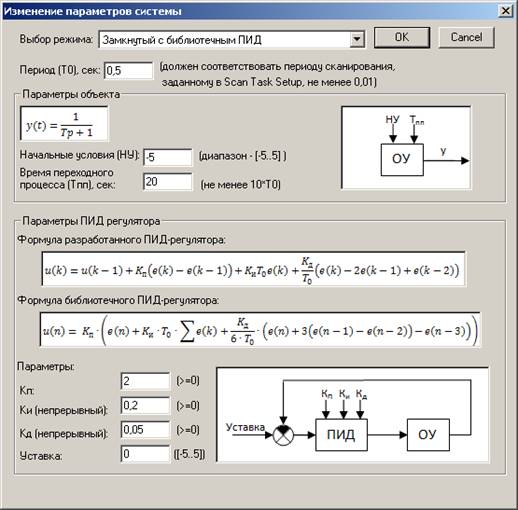
Рис.4.14. Значения, подаваемые на вход библиотечного ПИД-регулятора
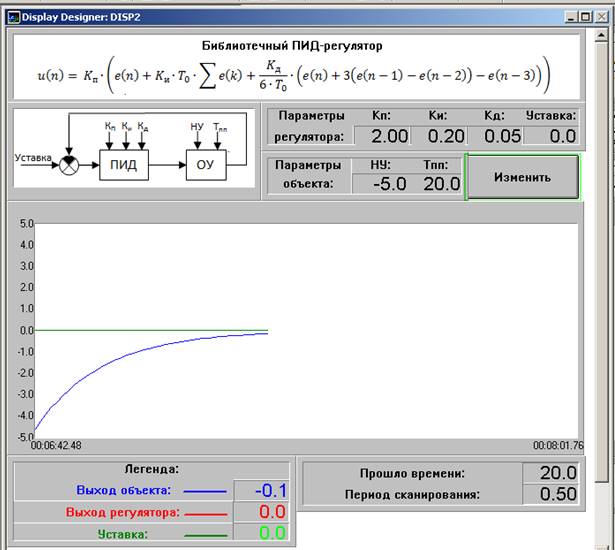
Рис.4.15. Результат работы системы
Теперь подадим на вход PID-change единицу и запустим систему с теми же параметрами, представленными на рис.4.13 и 4.14. В данном случае статические данные, заданные в настройках регулятора, должны не учитываться и в результате должен получиться такой же график, что и при значениях, представленных на рис.4.10, в настройках регулятора (они совпадают с данными, на рис.4.14). Результат работы системы, при данных параметрах, представлен на рис.4.16.
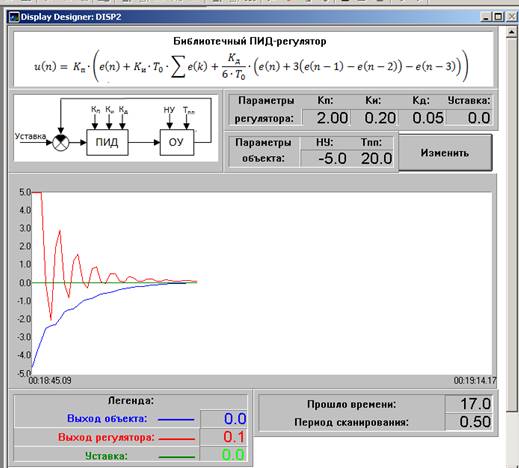
Рис.4.16. Результат работы системы
Как и ожидалось, при подаче на вход PID-change единицы, используются данные подаваемые на вход регулятора из других блоков, а статические значения, заданные в настройках регулятора не учитываются.
Проверим работу П-закона. Для этого подадим на вход Д- и И- нули. Результаты работы систем с разработанным и библиотечным регулятором приведены на рис.4.17. и 4.18 соответственно (используемые для тестирования настройки можно посмотреть на этих же рисунках).
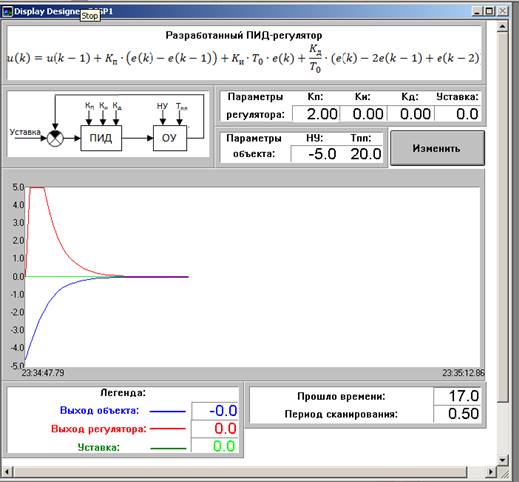
Рис.4.17. Результат работы разработанного регулятора
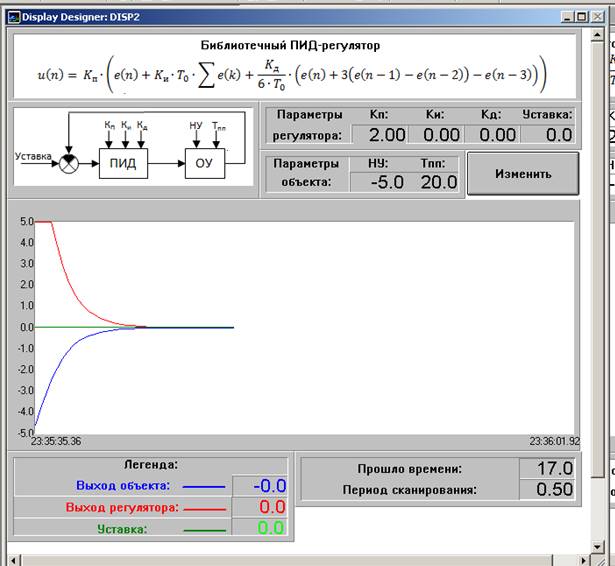
Рис.4.18. Результат работы библиотечного регулятора
Из рисунков видно, что результаты практически совпадают, различия вначале работы вызваны различными начальными значениями, используемыми в алгоритмах разработанного и библиотечного регуляторов.
Проверим работу И-закона. При этом надо учитывать что Кп является общим множителем для всех 3 составляющих библиотечного ПИД-регулятора. Результаты работы систем с разработанным и библиотечным регулятором приведены на рис.4.19. и 4.20 соответственно (используемые для тестирования настройки можно посмотреть на этих же рисунках).
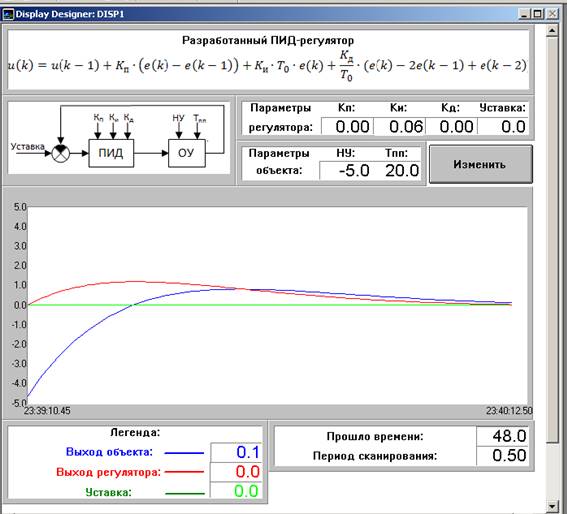
Рис.4.19. Результат работы разработанного регулятора
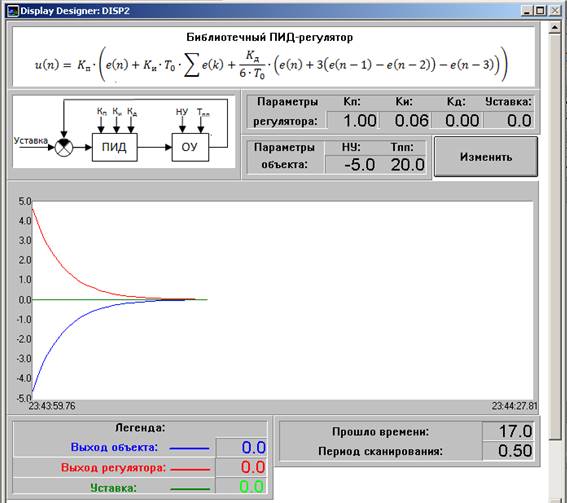
Рис.4.20. Результат работы библиотечного регулятора
Проверим работу Д-закона. Как и ранее учтем, что Кп является общим множителем для всех 3 составляющих библиотечного ПИД-регулятора. Результаты работы систем с разработанным и библиотечным регулятором приведены на рис.4.21. и 4.22 соответственно (используемые для тестирования настройки можно посмотреть на этих же рисунках).
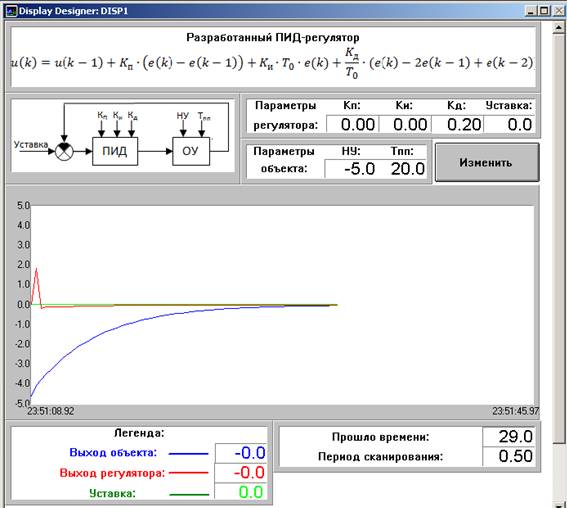
Рис.4.21. Результат работы разработанного регулятора
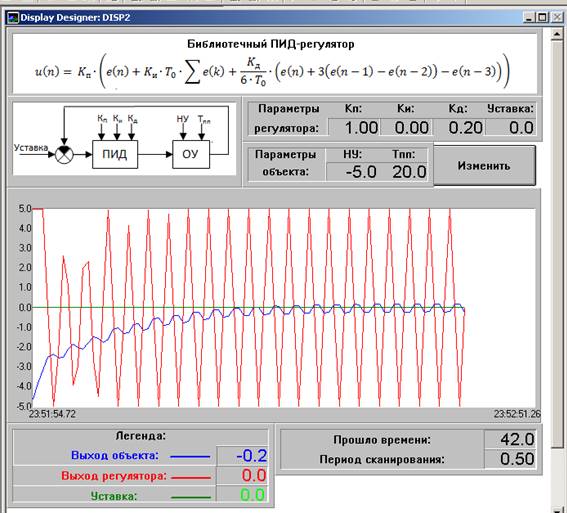
Рис.4.22. Результат работы библиотечного регулятора
Различия вызваны тем, что у библиотечного регулятора, время T0 измеряется в минутах, а у разработанного в секундах.
В заключении рассмотрим работу ПИ-закона, с увеличенными коэффициентами. Параметры библиотечного регулятора задаются в адаптивном и в неадаптивном режимах (настройки изображены на рис.4.23). Результаты тестов изображены на рис.4.24.-4.26.

Рис.4.23. Настройки библиотечного ПИД-регулятора

Рис.4.24. Результат работы разработанного регулятора
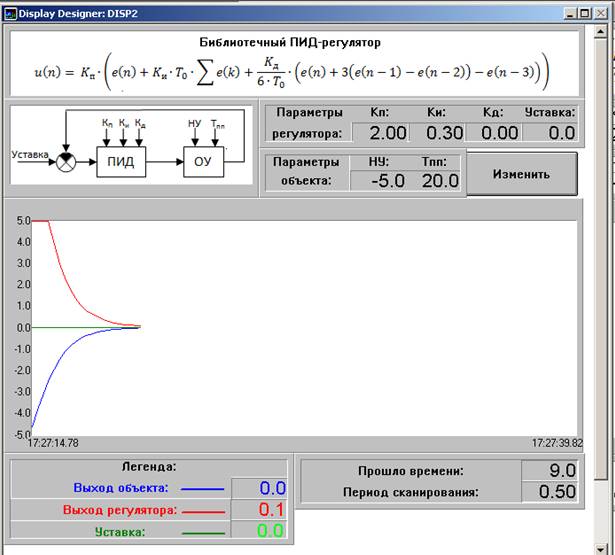
Рис.4.25. Результат работы разработанного регулятора (адаптивные параметры)

Рис.4.26. Результат работы разработанного регулятора (отключенные адаптивные параметры)
Различий между заданием параметров через адаптивные входы и заданием через настройки диалога нет. Различия в работе регуляторов связаны с различными алгоритмами ПИ-законов разработанного и библиотечного регуляторов.
1. Давыдов В. Г., Чыонг Динь Тяу «Проектирование компьютерных систем управления на основе SCADA-систем» Учебное пособие. СПб.: Издательство СПбГПУ, 2004. 152 с.
2. Давыдов В. Г., Денисов А. С. «Использование языка VBA в SCADA-системах» Учебное пособие. СПб. 2007. 155 с.
[ВГД1]Что это? Комментарии к этой формуле и сопоставление с разработанным регулятором?
[ВГД2]Диалоговое окно или окно редактора форм отображения?
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.