· картинка (Picture) – используется для отображения формул и рисунков объекта и регулятора.
Бейсик-скрипты используются для реализации алгоритмов работы системы. Использование двух бейсик-скриптов связанно с необходимостью использования 9 каналов вывода. Первый бейсик-скрипт имеет следующие выходы:
· коэффициенты Кп, Ки, Кд
· уставку
· начальные условия и время переходного процесса объекта
· период сканирования задачи
· значение на выходе регулятора
Второй бейсик-скрипт выводит текущее значение на выходе объекта
Схемы программ бейсик-сценариев приведены на рис.3.9.

Рис.3.9. Схема программ Бэйсик-скриптов
В диалоговом окне «Изменение параметров системы» имеется семь полей редактирования исходных данных, каждое из них имеет свои ограничения, указанные в самом диалоге в скобках рядом с каждым из параметров (рис.4.1.). Для тестирования работы всех ограничений введем в каждое из полей данные вне указанных диапазонов. Так как для параметров «Уставка» и «Начальные условия» существует как верхний так и нижний предел, понадобится два теста.
Вводимые для тестирования данные представлены на рис.4.1. и рис.4.3. Соответствующие результаты обработки ошибочных данных на рис.4.2 и рис.4.4.

Рис.4.1. Введенные ошибочнее данные


Рис.4.2. Результат обработки ошибочных данных
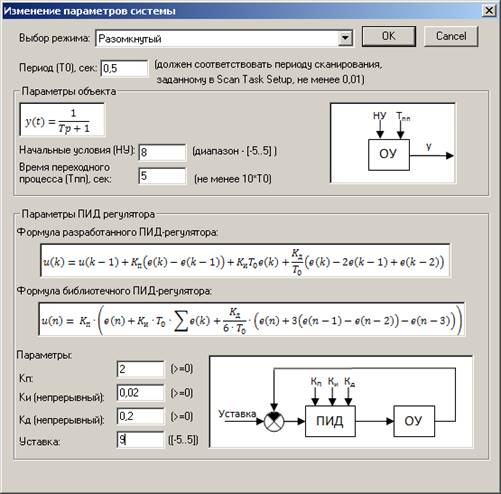
Рис.4.3. Ввод значений начальных условий и уставки, превышающих верхнюю границу
Рис.4.4. Результат обработки ошибочных данных
Для проверки работоспособности системы в целом составим тесты для каждого из режимов.
4.2.1. Тестирование режима «Разомкнутый»
Для режима «Разомкнутый» выполним следующие тесты:
· проверка правильности отработки вводимых начальных условий (вводимые данные и результаты работы приведены на рис.4.5-4.7);
· проверка времени переходного процесса (момент времени, при котором отклонение величины от установившегося значения составит не более 10%) и его инвариантности от периода сканирования задачи (вводимые данные и результаты работы приведены на рис.4.8-4.10)
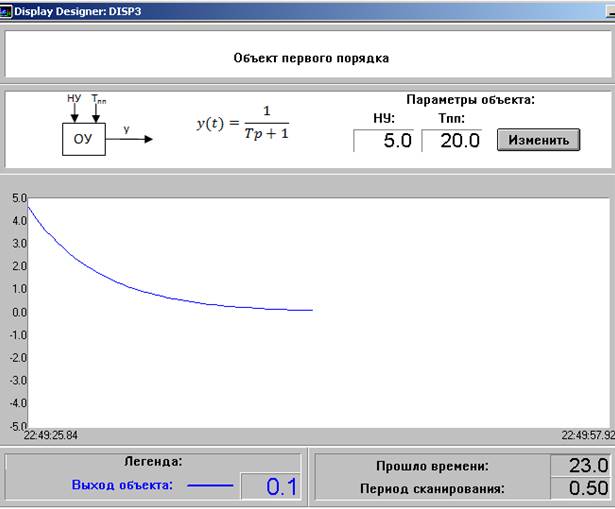
Рис.4.5. Разомкнутый режим. Начальные условия 5.
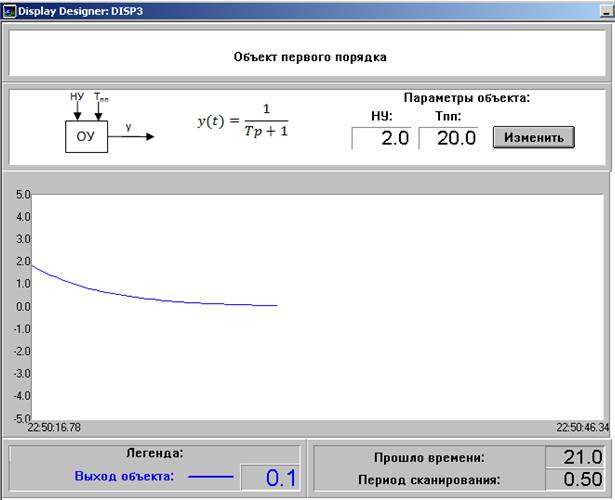
Рис.4.6. Разомкнутый режим. Начальные условия 2.

Рис.4.7. Разомкнутый режим. Начальные условия -3.
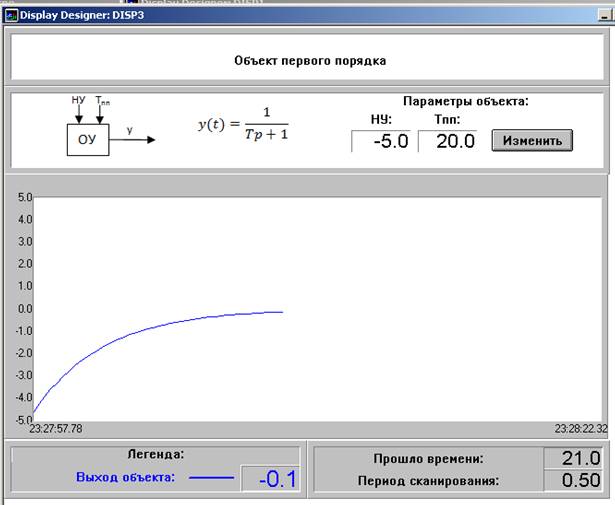
Рис.4.8. Проверка времени переходного процесса. Период сканирования задачи 0,5c

Рис.4.9. Проверка времени переходного процесса. Период сканирования задачи 1c

Рис.4.10. Проверка времени переходного процесса. Период сканирования задачи 1,5c
Выводы? Анализ?
4.2.2. Тестирование режима «Замкнутый с разработанным ПИД» и «Замкнутый с библиотечным ПИД»
Разработанный и библиотечный ПИД-регуляторы имеют одинаковые входы за исключением PID-change у библиотечного. Поэтому вначале протестируем работу данного входа, а затем проведем сравнительное тестирование работы П-, И- и Д- законов на обоих регуляторах.
Вход PID-change отвечает за адаптивное изменение параметров, при подаче на данный вход единичного значения, регулятор работает с параметрами Кп, Ки, Кд и уставки, подаваемыми на его вход из других блоков. При подаче нуля данные значения на входе игнорируются, и регулятор работает со статическими коэффициентами, заданными в соответствующих полях его диалоговой панели настройки. Поэтому для тестирования вначале подадим на вход PID-change 0 и зададим в настройках регулятора данные, представленные на рис.4.10. В диалоговом окне «Изменение параметров системы» введем нули (рис.4.11.). Результат работы системы представлен на рис.4.12.

Рис.4.10. Настройки библиотечного ПИД-регулятора
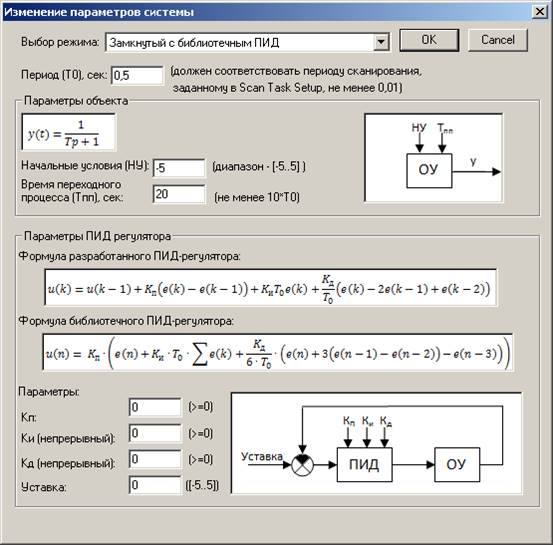
Рис.4.11. Значения, подаваемые на вход библиотечного ПИД-регулятора
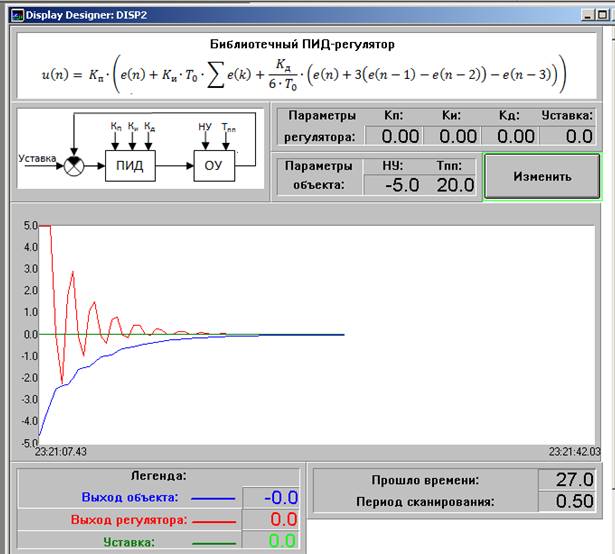
Рис.4.12. Результат работы системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.