Рис 4.5. Графики переходных процессов
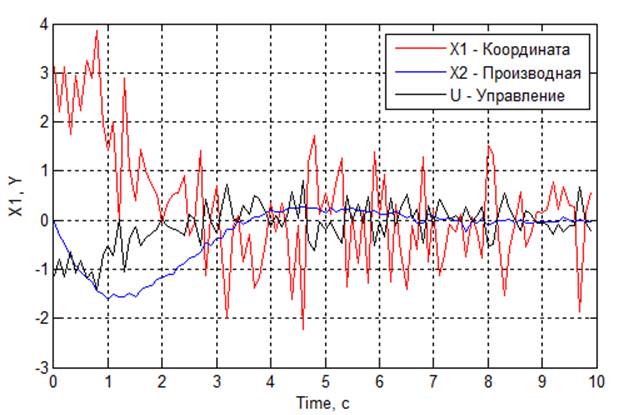
Рис 4.6. Графики переходных процессов
Лабораторная работа №13: Исследование оптимальной системы ЛК-управления с наблюдателем Калмана
1. Цель работы
Изучение организации, методов синтеза и исследование особенностей работы оптимальной системы линейно-квадратичного управления (ЛК-управления) с наблюдателем Калмана.
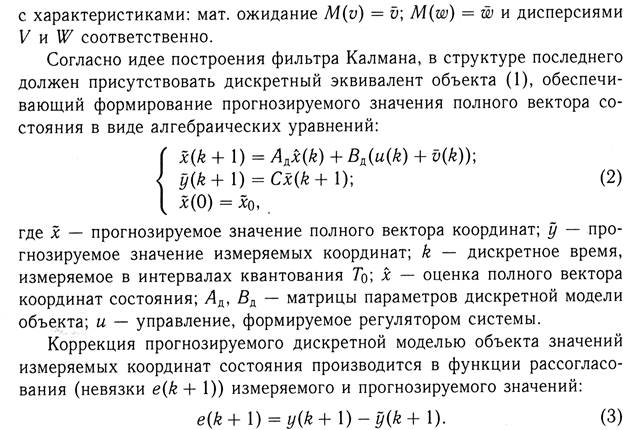
2. Теоретические положения
Как известно, организация систем оптимального терминального управления с использованием квадратичного критерия оптимальности (ЛК-управление) требует знания всех координат состояния объекта.
Если часть координат не может быть измерена, то при синтезе оптимального ЛК-управления применяются специальные восстановители (наблюдатели) неизмеряемых координат состояния. Если объект и измеритель координат находятся под воздействием случайных помех, в качестве наблюдателя наибольшее распространение получил фильтр Калмана. Структурная схема системы оптимального терминального ЛК-управления с фильтром Калмана в качестве наблюдателя представлена на рис.2.1.
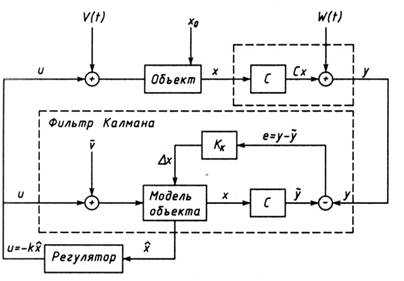
Рис.2.1. Структурная схема системы ЛК-управления с фильтром Калмана
Описанные выше процессы восстановления координат состояния и формируемые на их основе сигналы обратной связи иллюстрируются структурной схемой, приведенной на рис. 2.2.
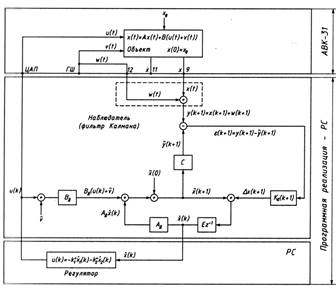
Рис.2.2. Структурная схема системы ЛК-управления с фильтром Калмана
3. Исходные данные
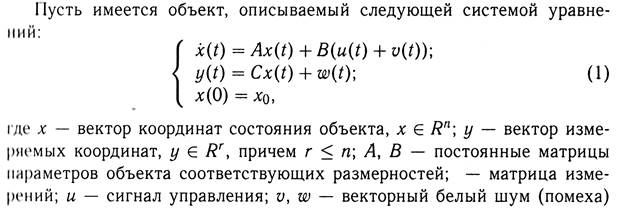
В настоящей работе рассматривается объект, математическая модель которого - дифференциальное уравнение второго порядка.
![]()
![]()
a0 = 1 a1 = 1 a2 = 2 b = 2
Рис. 3.1. Схема набора
Тогда дифференциальное уравнение системы имеет вид: ![]()
Параметры непрерывной модели
Х = ![]() А=
А= =
=![]() В=
В=![]() =
=![]()
4. ВЫполнение работы
4.1 Первый этап
Х = ![]() А==
А==![]() В=
В=![]() =
=![]()
Параметры дискретной модели:
Т0 = 0.1с Ад =![]() Вд =
Вд =![]() X0=
X0=![]()
Q =![]()
![]() .
.
В последующих пунктах параметры дискретных моделей одинаковы
k1 = 0
k2 = 0
J = 140.3587
Мат. ожидание помехи = 0.44
Дисперсия помехи входа(dv) = 0.72
Дисперсия помехи измерения(dw) = 0.72

Рис 4.1. Графики переходных процессов
4.2 При
заданных начальных условиях x0![]() , и разомкнутой обратной связи (k1 = 0, k2 = 0)
, и разомкнутой обратной связи (k1 = 0, k2 = 0)
k1 = 0
k2 = 0
J = 147.5397

Рис 4.2. Графики переходных процессов
4.3 При
заданных начальных условиях x0![]() и замкнутой обратной связи (k1
и замкнутой обратной связи (k1 ![]() 0, k2
0, k2 ![]() 0)
0)
J = 143.2839

Рис 4.3. Графики переходных процессов
4.4 Оценить
эффективность введения наблюдателя в систему оптимального управления k1 ![]() 0, k2 = 0
(При управлении по одной координате)
0, k2 = 0
(При управлении по одной координате)
J = 151.5631
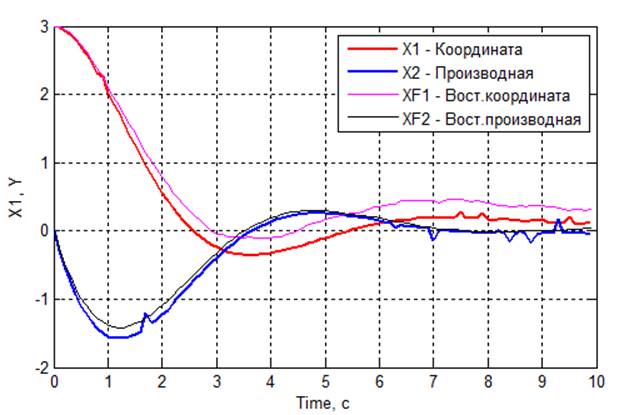
Рис 4.4. Графики переходных процессов
5. ВЫВОДЫ
Лабораторная работа №12: Исследование оптимальной системы ЛК-управления с наблюдателем Люенбергера
Проанализировав результаты экспериментов, можно сделать вывод о том, что несоответствие начальных условий в модели и в объекте приводит к увеличению инерционного запаздывания. При ЛК-управлении желательно использовать обе измеряемые координаты, тк при управлении по одной координате ухудшается динамика процесса, об этом свидетельствует увеличение критерия для системы с не полностью измеряемыми координатами. Шум в канале измерения так же негативно сказывается на качестве процесса.
Лабораторная работа №13: Исследование оптимальной системы ЛК-управления с наблюдателем Калмана
Сделав выводы по результатам экспериментов можно говорить о том, что качество процессов системы с наблюдателем в разомкнутом виде хуже, чем в замкнутом, так же негативно сказывается и отсутствие управления по одной из координат. Если сравнивать систему оптимального управления с наблюдателем и без, то можно сделать вывод о том, что добавление наблюдателя не всегда даёт улучшение в динамике управления, а в некоторых случаях даже ухудшает.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.