Санкт-Петербургский Государственный Политехнический Университет
Санкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра Компьютерные Системы и Программные Технологии
О Т Ч Ё Т
о лабораторной работе №12-13
Исследование оптимальной системы ЛК-управления с наблюдателем Люенбергера и наблюдателем Калмана
|
Выполнил: |
гр. 5081/10 _____________ А |
|
Преподаватель: |
_____________ |
Санкт-Петербург
2011
г.
Лабораторная работа №12: Исследование оптимальной системы ЛК-управления с наблюдателем Люенбергера
1. Цель работы
Изучение структуры построения и особенностей работы оптимальной системы ЛК-управления с наблюдателем Люенбергера;
Оценка эффективности применения наблюдателя в оптимальной системе ЛК-управления по начальным условиям;
2. Теоретические положения
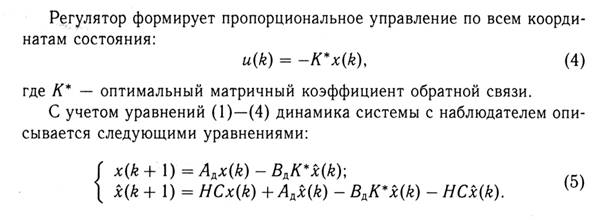
Как известно, оптимальное управление линейным объектом с использованием квадратичного критерия оптимальности (ЛК-управление) осуществляется в форме пропорционального управления по всем координатам состояния объекта.
Если часть координат не может быть измерена, то при синтезе оптимального ЛК-управления применяются специальные восстановители (наблюдатели) неизмеряемых координат состояния в форме специальных корректирующих динамических моделей. Структурная схема таких систем при управлении по начальным представлена на рис.1.1.
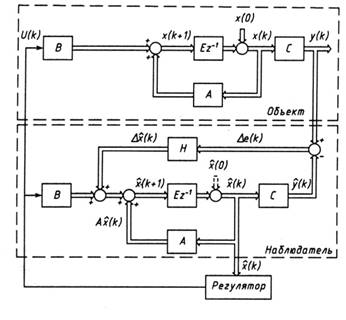
Рис 1.1. Структурная схема системы ЛК-управления по начальным условиям
Уравнение управляемого объекта
![]() , x(0) = x0
, x(0) = x0 ![]() 0;
0;
где ![]() – вектор координат
состояния объекта; u(k)
– вектор координат
состояния объекта; u(k)![]()
![]() – вектор измеряемых
координат состояния объекта,
– вектор измеряемых
координат состояния объекта, ![]() ,
, ![]() ,
, ![]() .
.
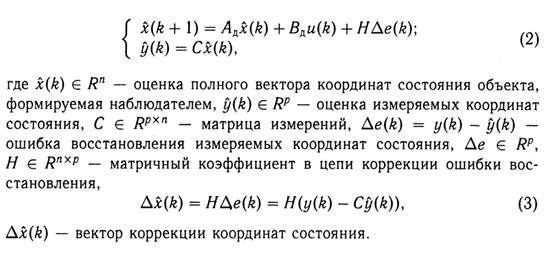
Уравнение наблюдателя
Так как в системах ЛК-управления наблюдатель строится по типу динамической системы, математически подобной объекту, с возможностью корректировки координат состояния модели, то его динамика может быть описана в дискретном времени следующей системой алгебраических уравнений:
Уравнение регулятора
3. Исходные данные
В настоящей работе рассматривается объект, математическая модель которого - дифференциальное уравнение второго порядка.
![]()
![]()
a0 = 1 a1 = 1 a2 = 2 b = 2
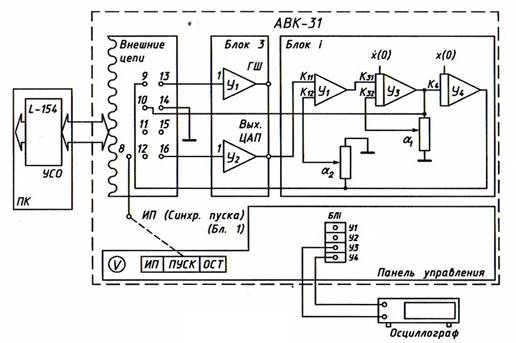
Рис. 3.1. Схема набора
Тогда дифференциальное уравнение системы имеет вид: ![]()
Параметры непрерывной модели
Х = ![]() А=
А= =
=![]() В=
В=![]() =
=![]()
4. ВЫполнение работы
4.1 Исследование системы ЛК-управления с полностью измеряемыми координатами состояния объекта
Х = ![]() А==
А==![]() В=
В=![]() =
=![]()
Параметры дискретной модели:
Т0 = 0.1с Ад =![]() Вд =
Вд =![]() X0=
X0=![]()
Q =![]()
![]() .
.
k1 = 0.365424
k2 = 0.642245
J = 127.8913
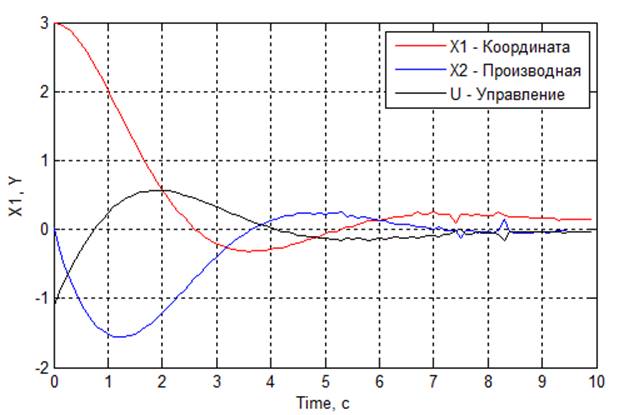
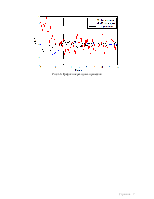
Рис 4.1. Графики переходных процессов
4.2 Исследование системы ЛК-управления с не полностью измеряемыми координатами состояния объекта
Оценка чистого запаздывания и фиксация переходного процесса при одинаковых значениях начальных условий в объекте и наблюдателе
Параметры дискретной модели (начальные условия модели и объекта заданы одинаково):
Т0 = 0.1с Ад =![]() Вд =
Вд =![]() X0=
X0=![]()
Q =![]()
![]() .
.
k1 = 0.365424
k2 = 0.642245
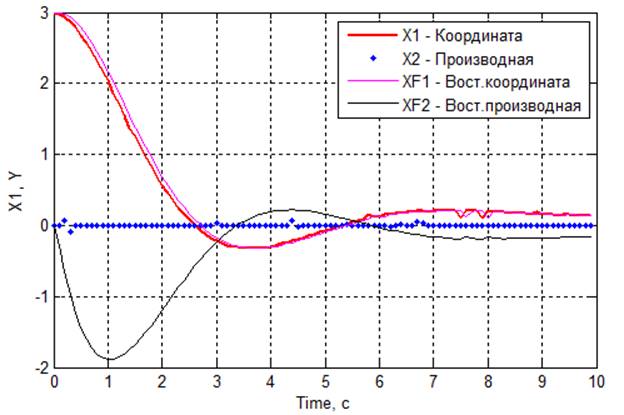
Рис 4.2. Графики переходных процессов
Оценка влияния инерционного запаздывания и получение соответствующих характеристик переходного процесса
Параметры дискретной модели (начальные условия модели и объекта различны):
Т0 = 0.1с Ад =![]() Вд =
Вд =![]() X0=
X0=![]()
Q =![]()
![]() .
.
k1 = 0.365424
k2 = 0.642245
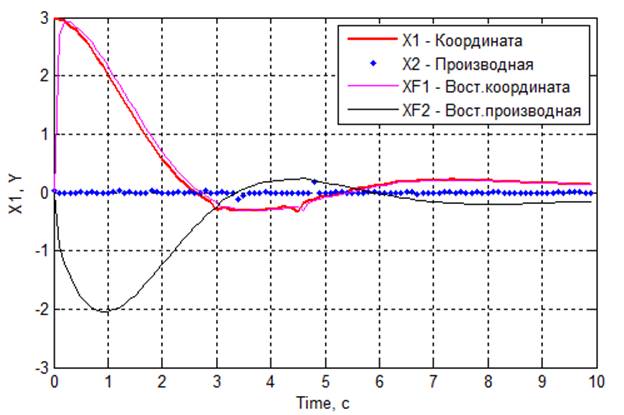
Рис 4.3. Графики переходных процессов
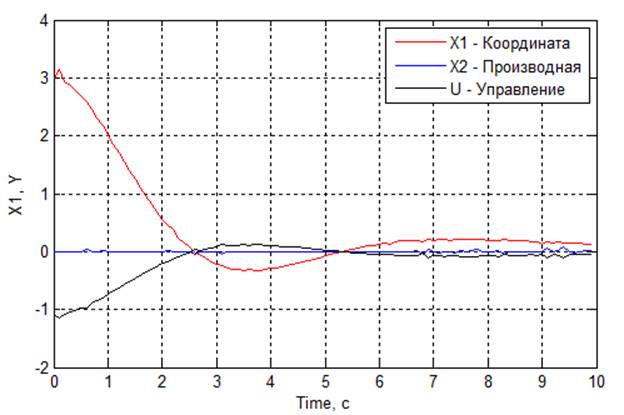
4.3 Исследование квазиоптимальной системы ЛК-управления c шумом и без.
Х = ![]() А==
А==![]() В=
В=![]() =
=![]()
Параметры дискретной модели:
Т0 = 0.1с Ад =![]() Вд =
Вд =![]() X0=
X0=![]()
Q =![]()
![]() .
.
k1 = 0.365424
k2 = 0.642245
J1 = 159.5739, J2 = 189.2100, J3 = 205,3211
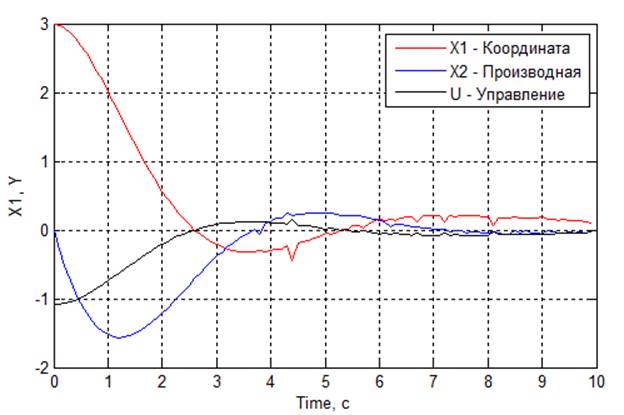
Рис 4.4. Графики переходных процессов
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.