САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ
КАФЕДРА АВТОМАТИКИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
Расчетное задание 5
Дисциплина: Адаптивные системы управления
Работу выполнил студент 5081/2
группа ФИО
Преподаватель
подпись ФИО
Санкт-Петербург
2009г.
Задание
Рассматривается объект, математическая модель которого - линейное дифференциальное уравнение второго порядка:
![]()
Требуется:
Синтезировать и исследовать БАСЭМ.
Теоретические положения
Беспоисковые адаптивные системы с эталонной моделью относятся к классу замкнутых БАС, то есть в них для формирования алгоритма адаптации используется координатная ошибка, т.е. разность выходов основного контура и эталонной модели. Общая схема такой системы приведена на рис. 1.1.
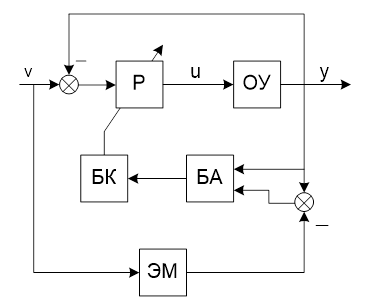
Рис. 1.1. Общая структура БАСЭМ
В данной работе исследуется метод скоростного градиента. В этом алгоритме изменение настраиваемых параметров производится в направлении, противоположном градиенту скорости изменения функционала, характеризующего качество оптимизации.
Функционал: ![]() –
основная функция качества где Р – симметричная и положительно
определенная диагональная матрица
–
основная функция качества где Р – симметричная и положительно
определенная диагональная матрица
Р=РТ , Р>0.
Скорость изменения функционала:
![]()
где: e – координатная ошибка основного контура по сравнению с эталоном
АЭ – матрица эталонного поведения системы
B – матрица управления системы
Р – обобщенный вектор сигналов
Целевая функция:
![]()
Отсюда получим закон изменения параметров регулятора:
![]()
Запишем уравнение регулятора как:
![]()
В этом случае можно записать следующие выражения для коррекции его коэффициентов:
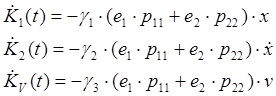
где: ![]() - диагональные элементы
матрицы Г
- диагональные элементы
матрицы Г
![]() - ошибка по
- ошибка по ![]()
![]() - ошибка по
- ошибка по ![]()
Исходные данные
a0 = 5 , a1 = ![]() α
= 1, β = 0
α
= 1, β = 0
Получаем следующее уравнение объекта:
![]()
Результаты исследования
1. Исходная система
На рис. 2.1 приведена SIMULINK-схема исследуемой системы. Моделирование производилось при нулевых начальных состояниях системы и при периодически подаваемом на её вход единичном входном сигнале.
![]()
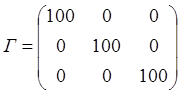
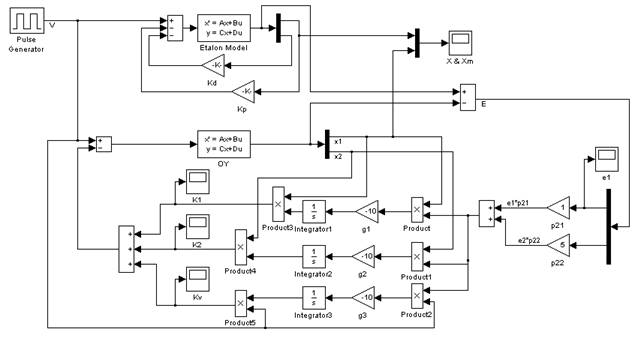
Рис. 2.1. SIMULINK-схема исследуемой системы
Рассмотрим ситуацию, при которой параметры объекта и модели совпадают. Модель включает в себя оптимальный ПД-регулятор с параметрами:
![]()
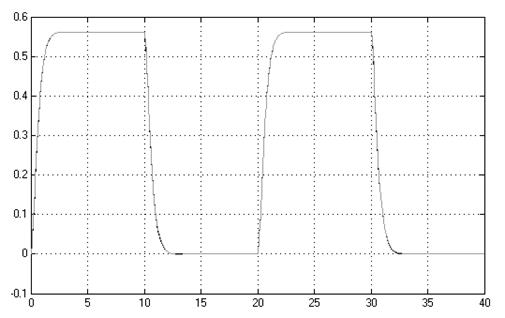
Рис. 2.2. Выходы первичного и эталонного контуров
(графики почти совпадают)
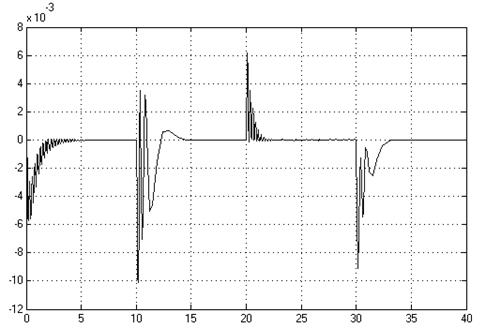
Рис. 2.3. Ошибка по х
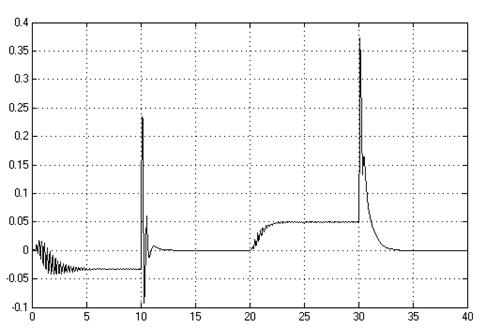
Рис. 2.4. График К1
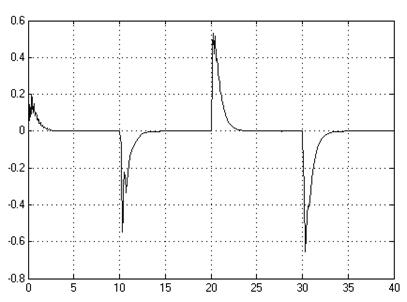
Рис. 2.5. График К2
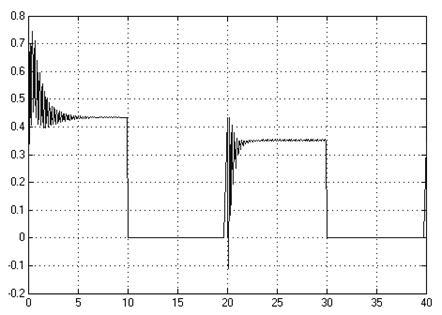
Рис. 2.6. График КV
Внесем в систему структурные помехи, увеличив а0 10 раз.
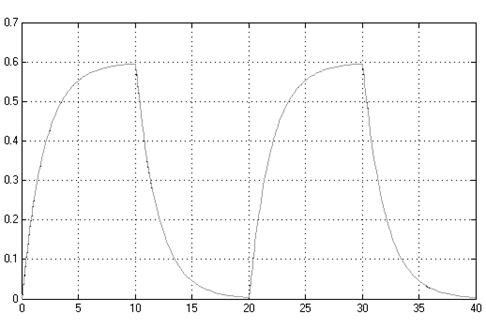
Рис. 2.7. Выходы первичного и эталонного контуров
(графики почти совпадают)
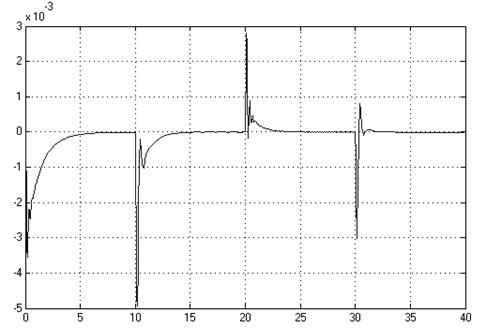
Рис. 2.8. Ошибка по х
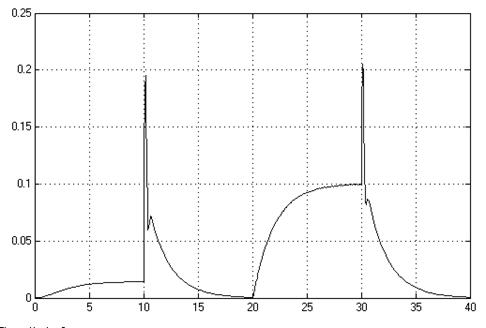
Рис. 2.9. Ошибка по х
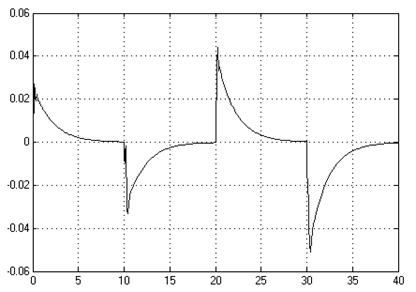
Рис. 2.10. График К1
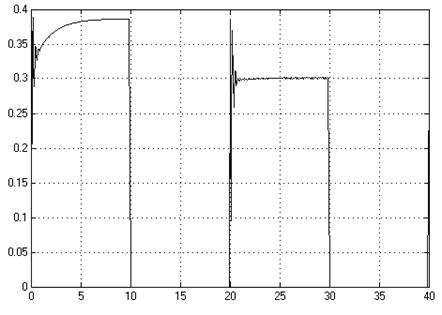
Рис. 2.11. График К1
2. Добавление пропорционального члена
![]()
В данном случае G=- 0,5
Поскольку данная модификация ориентирована на подавление малых помех, будем исследовать систему без больших структурных помех: а2=1.
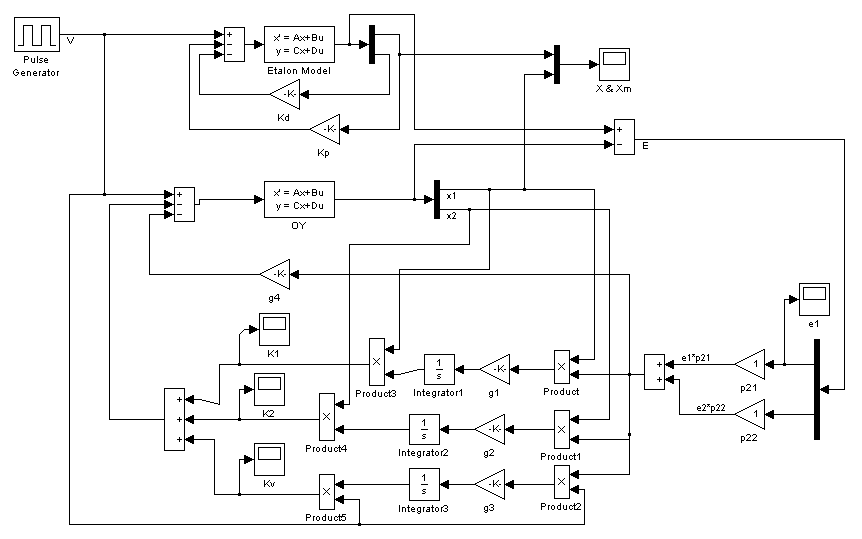
Рис. 2.12. Введение в модель пропорционального члена
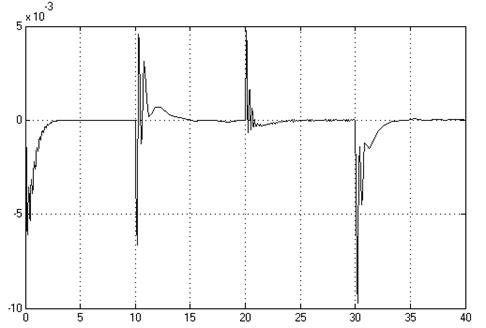
Рис. 2.13. Ошибка по x
Видно, что по сравнению с исходным вариантом значения ошибок (амплитуды «выбросов») уменьшились.
Выводы
По результатам выполненной работы можно отметить следующее.
Во-первых, система, построенная на основе метода скоростного градиента работоспособна, она осуществляет во время работы посредством коррекции коэффициентов регулятора все более и более точную подстройку выходов основного контура относительно эталонного, что можно наблюдать на примере затухающего характера ошибки по Х. При этом вносимые структурные помехи увеличивают время подстройки.
Внесение в систему адаптации дифференцирующего компонента приводит к увеличению быстродействия системы, но подчеркивает даже малые по величине помехи.
Внесение пропорционального члена дает эффект иного рода: оно позволяет сгладить небольшие по величине колебания ошибки.
Наконец, внесение элемента нечувствительности в систему позволяет сгладить «дрожание» входного сигнала системы адаптации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


