Санкт-Петербургский государственный политехнический университет
Кафедра компьютерных систем и программных технологий
Расчётное задание
Дисциплина: Адаптивные системы управления
Тема: Построение и исследование экстремальной СУ
Выполнил студент группы 5081/1 подпись
Преподаватель С.
подпись
Санкт-Петербург
2011
1. Задание
Задан объект, описываемый линейным дифференциальным уравнением 2-го порядка:
![]()
Исследовать алгоритмы идентификации параметров объекта в замкнутом и разомкнутом контурах управления. Применить следующие методы:
- рекуррентный метод наименьших квадратов,
- алгоритм Качмажа.
2. Исходные данные
![]()
Меняются значения параметра a0 (0.05, 0.5, 5).
Получим следующее уравнение:
![]()
2. Выполнение работы
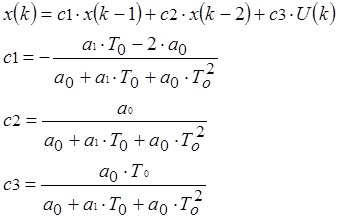
Осуществим переход к дискретной модели.
![]()
![]()
Скрипт в Matlab:
clear all
clc
T0 = [0.1 0.5 1];
a0 = 0.5;
A = [0 1; -a0 -0.8];
B = [0; a0];
C = [1 0];
D = 0;
sys = tf(a0, [1 0.8 a0]);
step(sys, 20);
hold on
for i=1:length(T0)
F = eye(2);
G = eye(2)*T0(i);
for j=1:100
F = F + A^j*T0(i)^j/factorial(j);
G = G + A^j*T0(i)^(j+1)/factorial(j+1);
end
dsys = ss(F, G, C, D, T0(i));
step(dsys, 20);
hold on
end
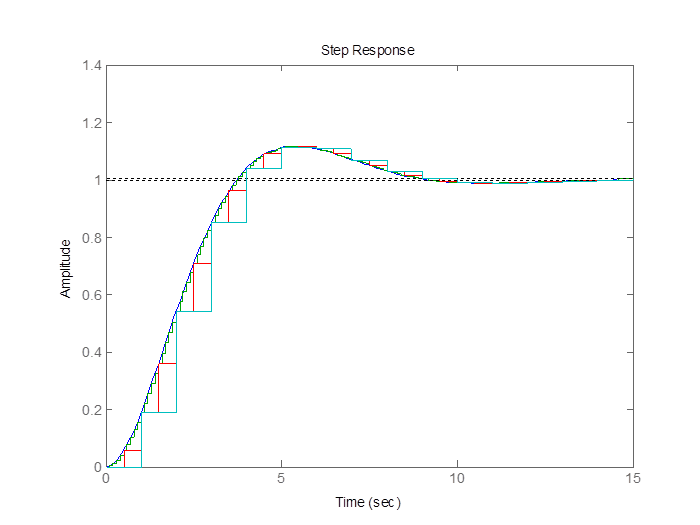
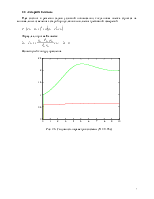
Рис. 2.1. Переходные процессы непрерывной системы и дискретных систем с различным T0
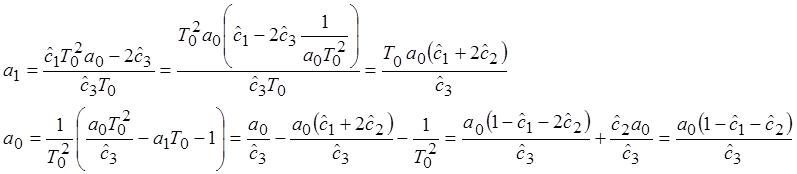
Переход от дискретной к непрерывной системе ( R(F, G, С) -> R*(A*, B*, C*) ):
![]()
![]()
![]()
![]()


Модель системы без сигнальных помех:
![]()
![]()

![]()
Уравнения для обратного преобразования оценочных коэффициентов в параметры системы:

2.1. Рекуррентный метод наименьших квадратов
Метод, сохраняя свой МНК, позволяет снизить объём хранимой информации. Работа происходит с текущими измерениями и предыдущей оценкой
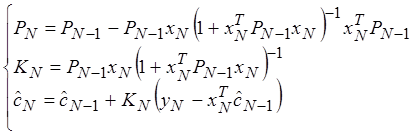
![]() – вектор
оценки неизвестных параметров после N-го измерения.
– вектор
оценки неизвестных параметров после N-го измерения.
![]()
1) Разомкнутая система
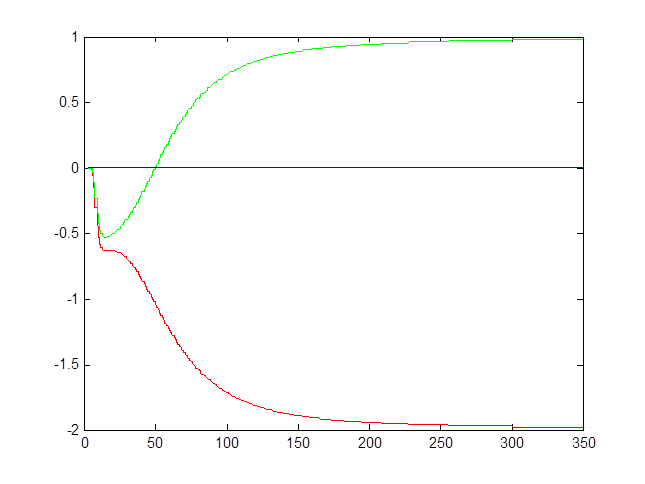
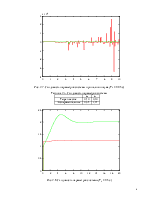
Рис. 2.2. Сходимость коэффициентов оценки параметров системы (Т0 = 0,01 с)
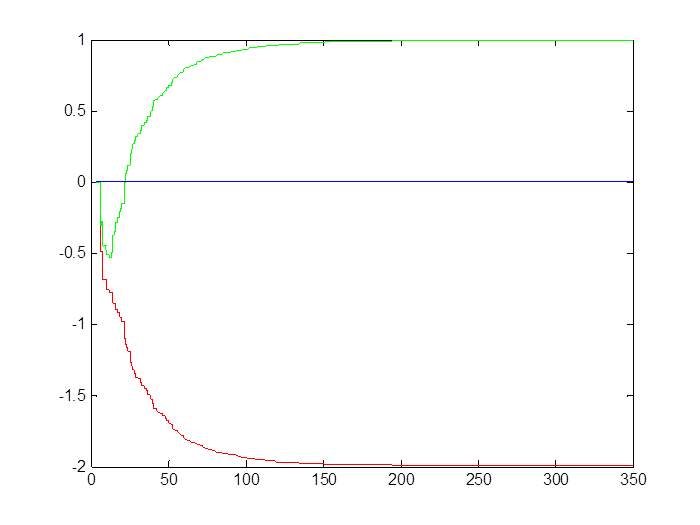
Рис. 2.3. Сходимость коэффициентов при наличии помехи (M = 0, D = 2)
Таблица 2.1. Сходимость коэффициентов оценки параметров системы
|
с1 |
с2 |
с3 |
|
|
Теоретические |
-1,9526 |
0,9842 |
0,0098 |
|
Экспериментальные |
-1,9792 |
0,9792 |
0,0001 |
|
Экспериментальные с помехой |
-1,9957 |
0,9958 |
0,0000 |
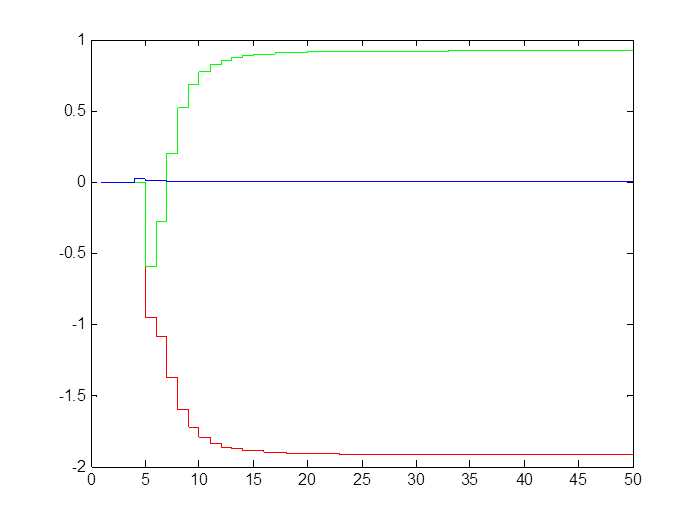
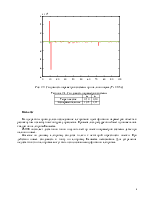
Рис. 2.4. Сходимость коэффициентов оценки параметров системы (Т0 = 0,1 с)
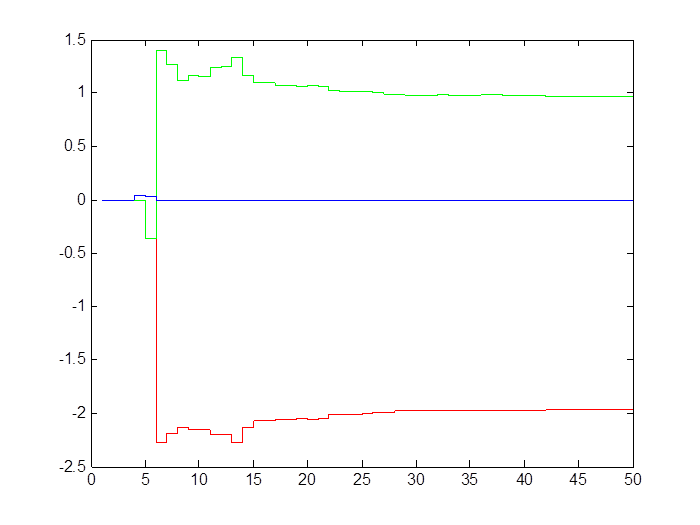
Рис. 2.5. Сходимость коэффициентов оценки при наличии помехи (M = 0, D = 2)
Таблица 2.2. Сходимость коэффициентов оценки параметров системы
|
с1 |
с2 |
с3 |
|
|
Теоретические |
-1,7226 |
0,8547 |
0,0855 |
|
Экспериментальные |
-1,9176 |
0,9224 |
0,0048 |
|
Экспериментальные с помехой |
-1,9669 |
0,9703 |
0,0026 |
2.2. Алгоритм Качмажа
Идея состоит в решении задачи условной оптимизации, когда новая оценка строится на минимальных изменениях старой при условии выполнения требований измерений.
![]()
Формула алгоритма Качмажа:
Разомкнутый контур управления.
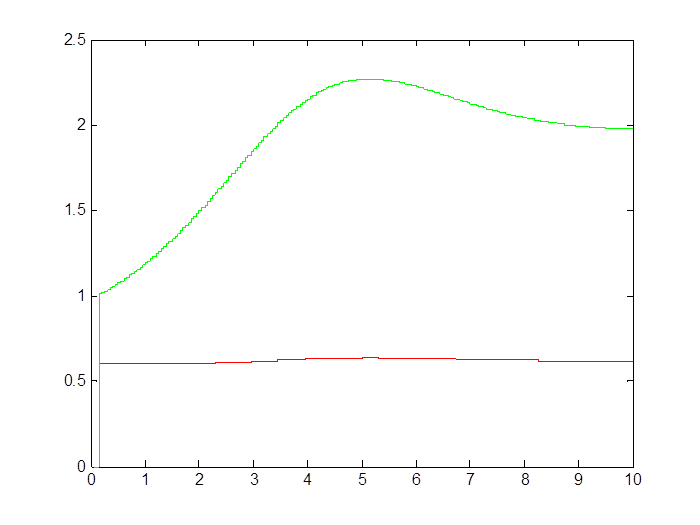
Рис. 2.6. Сходимость параметров системы (T0 = 0,05 с)
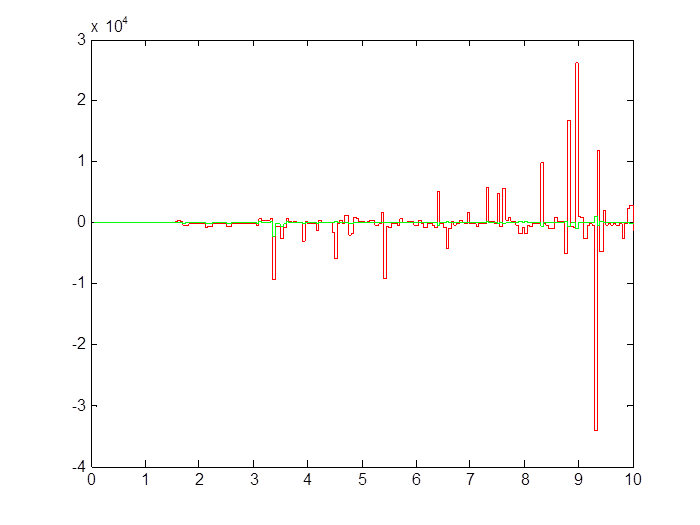
Рис. 2.7. Сходимость параметров системы при наличии шума (T0 = 0,05 с)
Таблица 2.3. Сходимость параметров системы
|
a0 |
a1 |
|
|
Теоретические |
0,50 |
0,80 |
|
Экспериментальные |
0,62 |
1,97 |
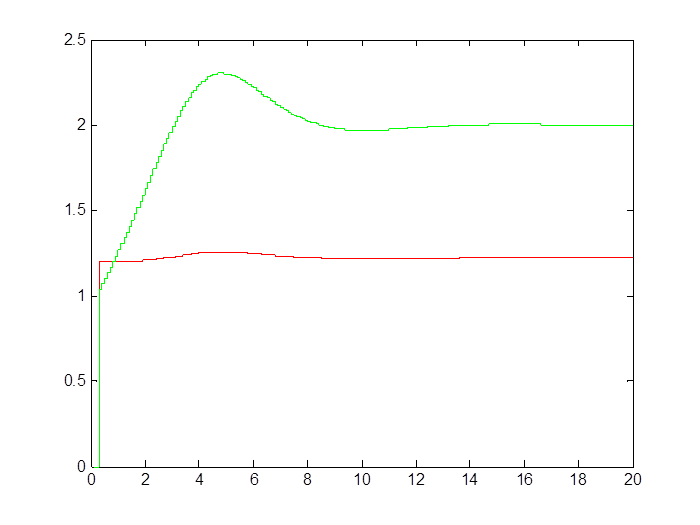
Рис. 2.8. Сходимость параметров системы (T0 = 0,5 с)
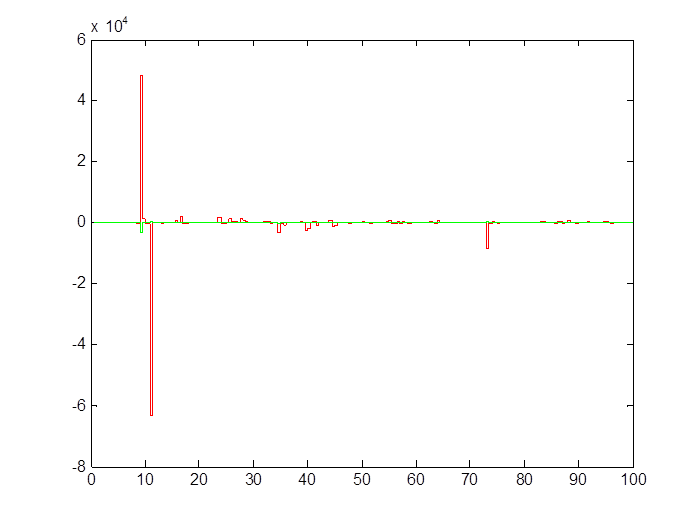
Рис. 2.9. Сходимость параметров системы при наличии шума (T0 = 0,5 с)
Таблица 2.4. Сходимость параметров системы
|
a0 |
a1 |
|
|
Теоретические |
0,50 |
0,80 |
|
Экспериментальные |
1,02 |
1,87 |
Выводы
В ходе работы проводилось исследование алгоритмов идентификации параметров объекта в разомкнутом и замкнутом контурах управления. Применялись рекуррентный метод наименьших квадратов и алгоритм Качмажа.
РМНК позволяет достаточно точно получить вектор оценки параметров системы даже при наличии помех.
Решение по данному алгоритму сходится только к некоторой окрестности оценки. При действии помех сходимость в точку по алгоритму Качмажа невозможна. Для устранения недостатков этого алгоритма могут быть использованы модификации алгоритма.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.