|
Вывод |
Обозначение |
Тип вывода |
Функциональное назначение вывода |
|
1-8 |
D0-D7 |
вход |
Информационная шина |
|
9 |
OE |
вход |
Разрешение передачи (управление 3-м состоянием) |
|
10 |
GND |
- |
Общий |
|
11 |
STB |
вход |
Стробирующий сигнал |
|
12-19 |
Q7-Q0 |
выход |
Информационная шина |
|
20 |
Ucc |
- |
Напряжение питания +5В±5% |
Выберем в качестве системного дешифратора микросхему КР1533ИД7[4], представляющую собой дешифратор на 8 выходов. DCS дешифрирует разряды адреса A5-A7, т.е. каждой периферийной БИС выделяется 32 адреса, что гарантирует возможность использования в МПС практически любой периферийной БИС при необходимости усовершенствования системы. DCS стробируется адресным сигналом A15 для разделения ИУВВ и энергонезависимого ОЗУ. С выхода DCS к периферийным устройствам идут сигналы CS0-CS2.
От МПМ к другим устройствам МПС
идут шины данных(D), адреса(A) и управления(C). В соответствии с типом
примененной ОМЭВМ шина данных является 8-разрядной, адреса-16-разрядной. В
состав шины управления включены формируемые ОМЭВМCPU
сигналы PSEN, ALE, WR, RD и подаваемый на нее сигнал RST. К ним также
добавляются сигналы выбора микросхем CS0-CS2, формируемые системным
дешифратором.
Выводы P1.3-P1.6 ОМЭВМCPU
используются для ввода сигналов X1-X4 от цифровых датчиков. Цифровые
управляющие сигналы Y1-Y3 выводятся через линии P1.7, P3.0, P3.1.
Динамическая головка BA1 узла аварийной сигнализации подключается к линии P3.3 через элемент-повторитель D2. В качестве BA1 используется широкополосная динамическая головка 0.25ГДШ-2, имеющая следующие параметры[3]: паспортная мощность 0.25 Вт; номинальная мощность 0.1 Вт; номинальное сопротивление 50 Ом; номинальный диапазон воспроизводимых частот 450-3150 Гц. В качестве D2 используется микросхема КР1533ЛП17(6 повторителей с повышенной нагрузочной способностью и открытым коллекторным выходом) с параметром[4] IOL£24 мА. Рассчитаем токоограничивающее сопротивление R2, включенное последовательно с динамической головкой. В соответствии с законом Ома:
R2min+R=(UCcmax-UOLmin)/IOLmax, где R-номинальное сопротивление динамической головки. Поскольку UOLmin=0,
R2min=UCCmax/IOLmax-R=5.5/(24*10-3)-50=180 Ом.
Выберем R2 с запасом 20%. Имеем R2=216 Ом. Определим мощность, выделяемую на резисторе:
P=(UCCmаx-UOLmin)2/R2=5.52/216=0.14 Вт.
Используем резистор МЛТ-0.25-220 Ом±5%.
В соответствии с заданием емкость памяти в МПС должна быть выбрана с запасом в 10-15 раз, учитывающим возможные изменения алгоритма управления. Выберем в качестве БИС ПЗУ программ микросхему К573РФ6А[5] с организацией 8Ксловx8разрядов, представляющую собой РПЗУ с УФ-стиранием. Микросхема совместима по входам со схемами серий ТТЛ. Применение РПЗУ позволяет при необходимости легко менять алгоритм управления. БИС ПЗУ данного типа обладают существенными достоинствами: сравнительно высоким быстродействием, наличием широкого набора микросхем с различной информационной емкостью, невысокой стоимостью и доступностью[2]. Таким образом, при возрастании требований к емкости ПЗУ программ возможна замена используемой БИС РПЗУ на микросхему большей информационной емкости.
Временные диаграммы работы микросхемы К573РФ6А в режиме считывания изображены на рис. 2.3
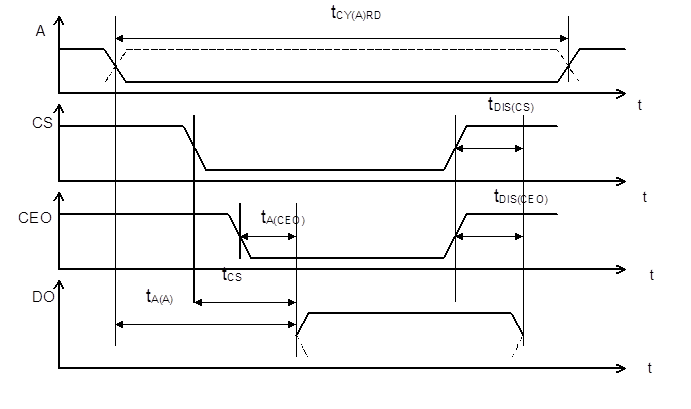
Рис. 2.3. Временные диаграммы работы микросхемы К573РФ6А в режиме считывания.
Рис.2.3.
Временные диаграммы работы микросхемы К573РФ6А в режиме считывания.
Основные динамические параметры микросхемы K573РФ6А приведены в таблице 2.3[5].
Таблица 2.3
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.