4. Заключение....................................................................................................... 37
Литература………………………………………………………………………………………..4338
Приложение 1. Структурная схема МПС…………………………………………………….4439
Приложение 2. Схема электрическая принципиальная
МПС……………………………4540
Задание
Задание
Целью курсового проектирования является приобретение навыков разработки микропроцессорных систем (МПС) на примере проектирования микропроцессорной системы для управления некоторым объектом (рис.1.1). МПС принимает информацию {X} об объекте управления {ОУ} от аналоговых и цифровых датчиков, вырабатывает управляющие воздействия {Y} в соответствии с законом управления и подает их на исполнительные механизмы {ИМ}. В МПС поступают от ОУ также сигналы прерывания {INT} от датчика аварийной ситуации и от датчика напряжения питания.
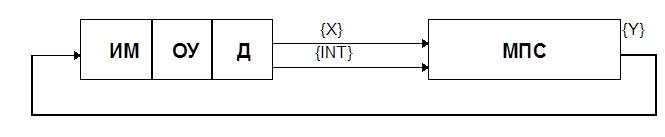
Рис.1.1. Объект, управляемый МПС
Рис. 1.1. Объект, управляемый МПС
МПС (рис.1.2) состоит из микропроцессорного модуля (МПМ), оперативного и постоянного запоминающих устройств (ОЗУ и ПЗУ), интерфейсных устройств ввода и вывода (ИУВВ), контроллера прерываний (КП) и пульта управления (ПУ), соединенных с помощью общей шины (ОШ).

Рис. 1.2. Структурная схема МПС
Рис. 1.2. Структурная схема МПС
В
курсовом проекте разрабатываются структурная и принципиальная электрическая
схемы МПС и программы, обеспечивающие выполнение заданного алгоритма
управления, осуществляется оценка параметров МПС.
В данном курсовом проекте разрабатывается МПС на основе однокристальной микроЭВМ КР1816ВЕ31.
В МПС реализуется алгоритм, представленный на рис.1.3.
Блоком 1 выполняется начальная установка системы: программирование БИС параллельного интерфейса, контроллера прерываний и др., засылка при необходимости в выходные каналы начальных значений управляющих воздействий и т.п.
Блоком 2 реализуется задача логического управления: прием информации с двоичных датчиков Х1,...,Х4, вычисление значения булевой функции F(X1,...,X4) в соответствии с заданным выражением и выдача этого значения в качестве управляющего двоичного сигнала Y1 по соответствующему выходному каналу на ИМ.

Рис. 1.3. Схема алгоритма управления объектом
Рис. 1.3 Схема алгоритма управления
объектом
Блоком
3 обеспечивается прием сигналов X5,X6,X7 с датчиков напряжения, их
преобразование в цифровую форму, вычисление значений управляющих воздействий
Y2-Y4. При этом Y2 и Y3 являются двоичными сигналами, а Y4 - напряжение,
которое получается после преобразования цифрового кода в аналоговую форму.
Блоками 4 и 5 обеспечивается требуемое время цикла управления, составляющее около 0.5 с. Блоком 6 реализуется или циклический режим управления или останов МПС в соответствии с командами, поступающими от оператора с ПУ.
МПС опрашивает двоичные датчики и вычисляет булеву функцию F(X1,...,X4)=X1+X2*X3*X4. При единичном значении функции МПС вырабатывает выходной сигнал Y1=1 длительностью Т1=50 мс. Через интервал Т1 после выдачи единичного сигнала Y1 необходимо выработать нулевой сигнал Y1.
Напряжения X5 и X6 преобразуются в цифровую форму с помощью АЦП. С выхода АЦП цифровые коды поступают на обработку. Код уставки К задается с ПУ оператором.
Вид реализуемой функции : Q2=F(N5,N6,K)=N5-N6+K. Полученное значение функции Q2 сравнивается с константой Q0, хранящейся в ПЗУ. В зависимости от результатов сравнения (рис.1.4) МПС вырабатывает двоичные управляющие воздействия Y2 или Y3 длительностью Т2=60 мс или Т3=120 мс соответственно.
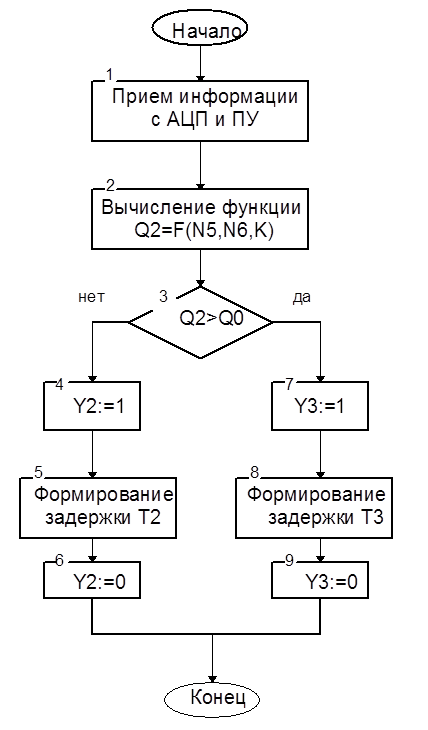
Рис. 1.4. Схема алгоритма выработки сигналов Y2 и Y3
Рис. 1.4. Схема алгоритма выработки
сигналов Y2 и Y3
Напряжение Х7 преобразуется с помощью АЦП в цифровую форму N7, затем вычисляется функция Q4=A0+A1*N7, где А0 и А1 - коэффициенты, хранящиеся в ПЗУ МПС.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.