Расчет нагрузочной способности производиться по токам низкого и высокого уровней, а также по емкости, подключаемой к выходу.
Сигналы адреса формируются в МПМ на буферном регистре КР1554ИР22 (младший байт) и на выводах Р2 (старший байт). Рассмотрим их по отдельности.
А) электрическое сопряжение для регистра.
К выводам этого порта подключены входы следующих микросхем:
1. Два дешифратора КР1554 ИД14 – к цепям адреса А2, А3;
2. Два элемента КР1554 ЛИ2 – к цепи адреса А4;
3. ККД КР580ВВ79 – к цепи адреса А0;
4. БИС ЗУ КР537РУ10 – к цепям адреса А0 – А7;
5. БИС ПЗУ КР573РФ4 – к цепям адреса А0 – А7;
6. АЦП КР572ПВ4 – к цепям адреса А0, А1.
Отсюда найдем:
1. Для А0:
![]() ;
;
![]() ;
;
![]() .
.
2. Для А1:
![]() ;
;
![]() ;
;
![]() .
.
3. Для А2, А3:
![]() ;
;
![]() ;
;
![]() .
.
4. Для А4:
![]() ;
;
![]() ;
;
![]() .
.
5. Для А5-А7:
![]() ;
;
![]() ;
;
![]() .
.
Б) электрическое сопряжение для порта Р2.
Для А8-А15:
![]() ;
;
![]() ;
;
![]() .
.
Видно, что выполняются все 3 условия электрического сопряжения. Кроме того, ни в одной цепи емкость нагрузки не превышает СL=50 пФ. Следовательно, корректировки временных параметров не требуется.
2.13. Расчет и выбор фильтров питания
Емкости, используемые в качестве фильтров НЧ и ВЧ помех по цепям питания, подключаются между питанием и корпусом и выбираются исходя из рекомендаций на применение микросхем серий КР580 и КР1533.
В качестве фильтра ВЧ помех, на каждые 10 корпусов ставится 1 конденсатор К10-17а-Н90-0,1мкФ. К основному источнику питания подключено 32 корпуса, следовательно, необходимо поставить 4 конденсатора C5 – C8.
Количество корпусов, подключенных к другим источникам питания, не превышает 10, поэтому достаточно одного конденсатора.
2.14. Расчет затрат оборудования
В МПС использовано 8 микросхем в 14-выводных корпусах, 1 микросхема в 16-выводном корпусе, 4 в 20-выводных, 2 в 24-выводных, 2 – в 28, и 1 – в 40-выводном корпусах.
Взяв за единицу сложности один 16-выводный корпус и руководствуясь коэффициентами пересчета, данными в методических указаниях, можно вычислить затраты оборудования то есть сложность схемы в условных единицах (корпусах).

Итого общее число корпусов составит 31 корпус.
Принципиальная электрическая схема разработанной МПС приведена в Приложении 1.
3. Разработка программного обеспечения МПС
3.1. Блок схема алгоритма работы МПС
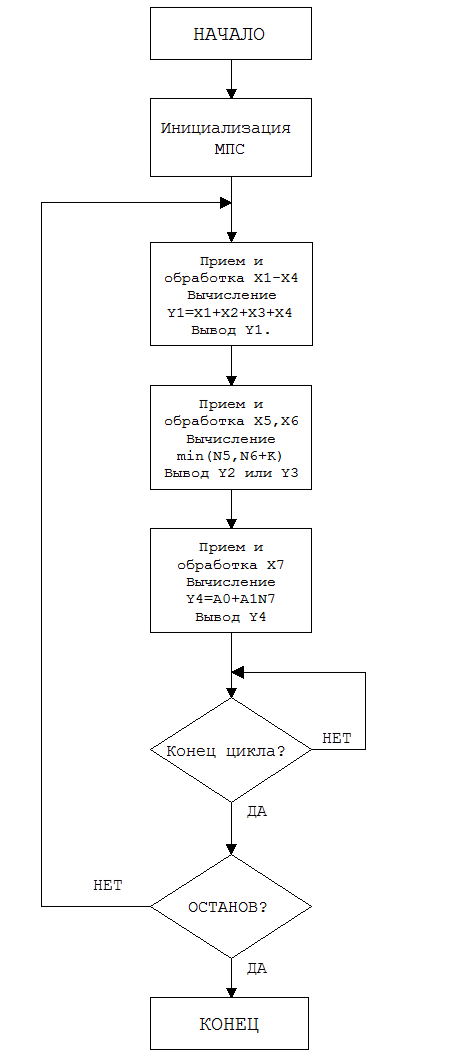
В алгоритме работы МПС можно выделить следующие основные этапы:
1. Инициализация МПС. На данном этапе выполняется первичная настройка МПС как то: настройка таймера для выдачи аварийной сигнализации, настройка контроллера клавиатуры и дисплея, настройка системы прерываний.
2. Прием Х1-Х4, вычисление и вывод У1. На этом этапе вводятся значения дискретных датчиков Х1-Х4, вычисляется логическая функция и выводится ее значение.
3. Прием Х5,Х6, вычисление и вывод У2, У3. Тоже, что на этапе 2, но Х5, Х6 являются аналоговыми сигналами и вводятся посредством АЦП.
4. Прием Х7, вычисление и вывод У4. Тоже, что на этапе 3, но У4 выводится через ЦАП.
Структурная схема алгоритма приведена на рис. 11.
Отдельно опишем алгоритм получения управляющих сигналов У2 и У3.
1. Прием Х5 и Х6 с АЦП, а К с ПУ.
2. Вычисление Q2=min(N5,N6+K).
3. Если Q2>Q0, то вывод У3 с соответствующей задержкой.
4. Если Q2<Q0, то вывод У2 с соответствующей задержкой.
Структурная схема этого алгоритма показана на рис. 12.
3.2. Разработка программы управления
3.2.1. Разработка блока инициализации
При запуске МПС необходимо программирование режима работы ОМЭВМ и микросхемы ККД КР580ВВ79.
Контроллер клавиатуры/дисплея находится в блоке управления и индикации и обеспечивает прием данных с клавиатуры и вывод информации на 8-позиционный однострочный дисплей. Для ввода с клавиатуры используем режим сканирования клавиатуры, с обнаружением N-клавишных сцеплений. В указанном режиме при нажатии клавиши в ОМ-ОЗУ заносится ее позиция в клавиатуре в формате, приведенном в таблице 7.
Таблица 7. Формат информации о нажатой клавише
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.