Федеральное агентство по образованию Российской Федерации
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ
УНИВЕРСИТЕТ РАСТИТЕЛЬНЫХ ПОЛИМЕРОВ
Курсовая работа
Программирование и наладка контроллера
Вариант 12
Выполнил: Проверил:
студент гр.552 доцент
2005
Содержание
1. Структура и обобщенный алгоритм функционирования МКС……………4
2. Обработка информации, поступающей с дискретных датчиков (Х1, …, Хn)…………………………………………………………6
3. Обработка информации, поступающей с аналоговых датчиков (V1, …, Vm)………………………………………………………...9
4. Управление пуском - остановом электродвигателя……………………….12
5. Управление технологическим параметром в заданных пределах……….14
1. Структура и обобщенный алгоритм функционирования МКС
 Микроконтроллерная система (МКС) принимает
множество информационных сигналов {X} об объекте управления (ОУ) от аналоговых
и цифровых датчиков (Д), вырабатывает множество управляющих сигналов {Y} в
соответствии с законом управления и подает их на исполнительные механизмы (ИМ).
Закон управления реализуется в МКС, состоящей из микроконтроллера (МК) –
управляющей микроЭВМ и пульта управления (ПУ). МК содержит основные модули,
обеспечивающие выполнение и хранение данных и программ управления объектом, а
также периферийные модули для подключения датчиков и исполнительных механизмов.
Микроконтроллерная система (МКС) принимает
множество информационных сигналов {X} об объекте управления (ОУ) от аналоговых
и цифровых датчиков (Д), вырабатывает множество управляющих сигналов {Y} в
соответствии с законом управления и подает их на исполнительные механизмы (ИМ).
Закон управления реализуется в МКС, состоящей из микроконтроллера (МК) –
управляющей микроЭВМ и пульта управления (ПУ). МК содержит основные модули,
обеспечивающие выполнение и хранение данных и программ управления объектом, а
также периферийные модули для подключения датчиков и исполнительных механизмов.
С помощью ПУ оператор получает возможность управлять работой МКС: запускать и останавливать ее, загружать в контроллер значения некоторых устaвок (констант), выводить на индикаторы информацию о состоянии объекта и т.п.
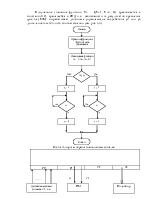
МКС реализует обобщенный алгоритм сбора и обработки данных с датчиков, представленный на рис 2. Блок 1 выполняет начальную установку системы изагрузку в выходные каналы начальных значений управляющих воздействий и настраивает модули контроллера на выбранные режимы работы.
Блок 2 реализует задачу логического управления: принимает информацию от дискретных датчиков Х1, …, Хn, вычисляет значение булевой функцииY1= f(Х1, …, Хn) в соответствии с заданным выражением и выдает это значение в качестве управляющего сигнала (УС) Y1 по соответствующему выходному каналу контроллера на ИМ. Блок 3 обеспечивает прием информации от аналоговых датчиков V1, …, Vm, ее преобразование в цифровую форму, вычисление значений управляющих воздействий Y2 и Y3 и выдает их на ИМ. При этом сигналы Y2 и Y3 являются двоичными сигналами, поступающими по выбранным каналам контроллера. При выполнении этой функции оператор задает значения уставок регулируемого параметра с пульта управления (ПУ) контроллера. Блок 4 обеспечивает циклический режим управления или останов МКС в соответствии с командой, поступающей от оператора с ПУ.
 |
2. Обработка информации, поступающей
с дискретных датчиков (Х1, …, Хn)
МКС опрашивает двоичные датчики Х1, …, Хn и вычисляет логическую функцию Y1= f(Х1, …, Хn) в соответствии вариантом задания. При единичном значении функции МКС вырабатывает в ИМ выходной сигнал Y1 = 1.
![]() Рассмотрим реализацию логической функции для
первого варианта посредством способа, использующего команды условных переходов.
При данном способе вычисление функции выполняется на основе разветвленного
алгоритма типа дерева решений. Значения булевых аргументов последовательно
анализируются командами условного перехода до тех пор пока не определится
значение функции. На рис.3 приведен алгоритм реализации функции с
использованием команд условных переходов.
Рассмотрим реализацию логической функции для
первого варианта посредством способа, использующего команды условных переходов.
При данном способе вычисление функции выполняется на основе разветвленного
алгоритма типа дерева решений. Значения булевых аргументов последовательно
анализируются командами условного перехода до тех пор пока не определится
значение функции. На рис.3 приведен алгоритм реализации функции с
использованием команд условных переходов.
Анализируемые входные наборы сигналов Хi должны быть вначале загружены из входного порта в аккумулятор контроллера, а затем анализироваться последовательно, начиная с переменной X1, поступающим в нулевой разряд входного порта (см. алгоритм).
Анализируемые биты должны заноситься в триггер переноса C командой циклического сдвига аккумулятора RRC A (для чего исходный код должен быть предварительно загружен в аккумулятор), а затем анализироваться командами условного перехода JC или JNC.
 |
|||
![]()
![]() Нет
Нет
![]() Да
Да
![]() Да
Да
Нет
![]()
![]() Да Нет
Да Нет
![]()
![]()
![]()
![]()
|
 |
|||||
Рис.3 Блок-схема алгоритма выполнения логической функции
Таблица истинности
|
Х1 |
Х2 |
Х3 |
Y |
|
0 |
0 |
0 |
0 |
|
0 |
0 |
1 |
0 |
|
0 |
1 |
0 |
0 |
|
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
0 |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
|
1 |
1 |
1 |
0 |
Структурная схема контроллера для реализации заданной функции:
 |
Программы выполнения данного алгоритма
Реализация логической функции, используя входные порты контроллера
$mod812
org 40h ; данная директива определяет начальный адрес программы в РПП
mov A,P0 ; ввод сигналов из порта Р0 в аккумулятор
rrc A ; сдвиг переменной х1 в флажок переноса «С»
jc M1
rrc A
jc M1
rrc A
jnc M1
rrc A
jnc M2
M1: setb P1.0; установка нулевого разряда порта Р1 в 1 для формирования сигнала У=1
jmp M3
М2: clr P1.0 ; установка нулевого разряда порта Р1 в 0 для формирования сигнала У=0
M3: jmp M3 ; данная команда безусловного перехода имитирует останов
; выполнения программы
end
Размер: 15 байт
Реализация логической функции автоматическим формированием входных сигналов
В памяти данных формируется таблица истинности, начиная с выбранного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.