Проводится обучение сети на основе обучающей последовательности для каждого входа и выхода сети;
4. Рассчитываются переходные характеристики при изменении задания и возмущения, проводится анализ качества АСР.
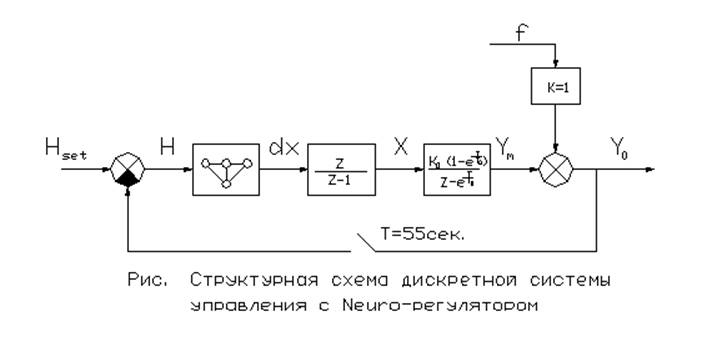
При синтезе АСР была использована сеть типа MLP, состоящая из трех слоев.
Первый слой входной, состоящий из одного входного нейрона, второй скрытый слой, состоящий из 5 нейронов, и выходной слой с одним выходом нейроном (структура сети 1-5-1). Проводим обучение сети на основе обучающей последовательности. Текстовый файл, содержащий обучающую программу, состоит из числа строк не менее числа нейронов в скрытых слоях, т.е. 5. В текстовый файл записаны точки статической обратной характеристики объекта, представленной на Рис. 4.
Рис.4 Статическая обратная модель объектаdx=f(F)
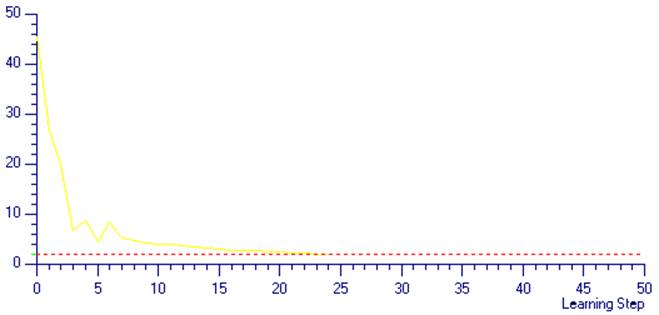
Рис. Процесс обучения сети. (ActualError 5%)
Алгоритм обучения выбранной архитектуры сети - метод обратного распространения ошибки (Error Back Propagation), подходящий для обучения персептрона.
Тест обученной сети производится по файлу, структура которого аналогична файлу обучения. Результаты тестирования можно наблюдать в сигнальном и векторном представлении.
Модели объекта представлены на рис. B и C
Расчет управляющего воздействия осуществляется в пакете NeuroSystems1.0 фирмы «Siemens», а расчет ошибки регулирования табличным методом в Microsoft Excel. Результаты расчета сведены в таблицу 3, а переходный процесс по управлению представлен на Рис.6.
Таблица 3 Расчет управляющего воздействия по каналу передачи управляющего воздействия
|
X[n-1] |
Ym[n-1] |
Ym[n] |
Yв[n] |
Yo[n] |
F[n] |
dX |
dXneuro |
X[n] (отклон) |
|
0,00 |
0 |
0,0000 |
0,00 |
0,00 |
0,0000 |
0,00 |
0,0000 |
0,0000 |
|
0,00 |
0,00 |
0,0000 |
0,00 |
0,00 |
1,2000 |
12,00 |
12,0700 |
12,0700 |
|
12,07 |
0,00 |
1,2060 |
0,00 |
1,21 |
-0,0060 |
-0,06 |
-0,0800 |
11,9900 |
|
11,99 |
1,21 |
1,1990 |
0,00 |
1,20 |
0,0010 |
0,01 |
-0,0080 |
11,9820 |
|
11,98 |
1,20 |
1,1982 |
0,00 |
1,20 |
0,0018 |
0,02 |
-0,0069 |
11,9751 |
|
11,98 |
1,20 |
1,1975 |
0,00 |
1,20 |
0,0025 |
0,02 |
-0,0030 |
11,9721 |
|
11,97 |
1,20 |
1,1972 |
0,00 |
1,20 |
0,0028 |
0,03 |
0,0004 |
11,9725 |
|
11,97 |
1,20 |
1,1972 |
0,00 |
1,20 |
0,0028 |
0,03 |
0,0032 |
11,9757 |
|
11,98 |
1,20 |
1,1976 |
0,00 |
1,20 |
0,0024 |
0,02 |
-0,0001 |
11,9756 |
|
11,98 |
1,20 |
1,1976 |
0,00 |
1,20 |
0,0024 |
0,02 |
-0,0001 |
11,9755 |
|
11,98 |
1,20 |
1,1975 |
0,00 |
1,20 |
0,0025 |
0,02 |
-0,0057 |
11,9698 |
|
11,97 |
1,20 |
1,1970 |
0,00 |
1,20 |
0,0030 |
0,03 |
-0,0001 |
11,9697 |
|
11,97 |
1,20 |
1,1970 |
0,00 |
1,20 |
0,0030 |
0,03 |
0,0003 |
11,9700 |
|
11,97 |
1,20 |
1,1970 |
0,00 |
1,20 |
0,0030 |
0,03 |
0,0002 |
11,9702 |
|
11,97 |
1,20 |
1,1970 |
0,00 |
1,20 |
0,0030 |
0,03 |
-0,0001 |
11,9701 |
|
11,97 |
1,20 |
1,1970 |
0,00 |
1,20 |
0,0030 |
0,03 |
-0,0001 |
11,9700 |
|
11,97 |
1,20 |
1,1970 |
0,00 |
1,20 |
0,0030 |
0,03 |
-0,0010 |
11,9690 |
Рис.6 Переходный процесс по каналу передачи управляющего воздействия с Neuro-регулятором
Переходный процесс вышел на заданное значение практически с малым перерегулированием, в результате чего можно говорить о высоком качестве переходного процесса при данном периоде дискретности по управлению.
Расчет переходного процесса по каналу передачи возмущающего воздействия на выходе объекта производится аналогично, при этом величина задания равна нулю, а в столбец Yв подставляются значения возмущающего воздействия на данном такте регулирования, рассчитанные в предыдущей курсовой работе. Результаты расчета сведены в таблицу 4., а график переходного процесса по каналу возмущения с neuro -регулятором представлен на Рис. 7.
Таблица 4 Расчет переходного процесса по каналу передачи возмущающего воздействия на выходе объекта
|
Такт n |
X[n-2] |
Ym[n-1] |
Ym[n] |
Yв[n] |
Yo[n] |
F[n] |
dX |
dXneuro |
X[n] ( отклон.) |
|
0 |
0,00 |
0 |
0,00 |
0 |
0,00 |
0,000 |
0,00 |
0,00 |
0,00 |
|
1 |
0,00 |
0,00 |
0,00 |
0,999574 |
1,00 |
-1,000 |
-10,00 |
-9,95 |
-9,95 |
|
2 |
0,00 |
0,00 |
0,00 |
-0,05837 |
-0,06 |
0,058 |
0,58 |
0,57 |
0,57 |
|
3 |
-9,95 |
0,00 |
-0,99 |
-0,99616 |
-1,99 |
1,990 |
19,90 |
19,01 |
9,06 |
|
4 |
0,57 |
-0,99 |
0,06 |
0,116549 |
0,17 |
-0,173 |
-1,73 |
-1,75 |
-1,18 |
|
5 |
9,06 |
0,06 |
0,91 |
0,989358 |
1,89 |
-1,895 |
-18,95 |
-18,74 |
-9,68 |
|
6 |
-1,18 |
0,91 |
-0,12 |
-0,17433 |
-0,29 |
0,292 |
2,92 |
-18,00 |
-19,18 |
|
7 |
-9,68 |
-0,12 |
-0,97 |
-0,97918 |
-1,95 |
1,947 |
19,47 |
18,76 |
9,08 |
|
8 |
-19,18 |
-0,97 |
-1,92 |
0,23151 |
-1,69 |
1,686 |
16,86 |
1,33 |
-17,85 |
|
9 |
9,08 |
-1,92 |
0,91 |
0,965658 |
1,87 |
-1,871 |
-18,71 |
-18,57 |
-9,49 |
|
10 |
-17,85 |
0,91 |
-1,78 |
-0,2879 |
-2,07 |
2,071 |
20,71 |
1,39 |
-16,46 |
|
11 |
-9,49 |
-1,78 |
-0,95 |
-0,94884 |
-1,90 |
1,899 |
18,99 |
0,06 |
-9,43 |
|
12 |
-16,46 |
-0,95 |
-1,65 |
0,343315 |
-1,30 |
1,302 |
13,02 |
-1,32 |
-17,78 |
|
13 |
-9,43 |
-1,65 |
-0,94 |
0,928795 |
-0,01 |
0,015 |
0,15 |
-1,90 |
-11,33 |
|
14 |
-17,78 |
-0,94 |
-1,78 |
-0,39756 |
-2,17 |
2,175 |
21,75 |
-1,40 |
-19,18 |
|
15 |
-11,33 |
-1,78 |
-1,13 |
-0,90558 |
-2,04 |
2,039 |
20,39 |
-0,08 |
-11,41 |
|
16 |
-19,18 |
-1,13 |
-1,92 |
0,450441 |
-1,47 |
1,467 |
1,31 |
0,31 |
-18,87 |
|
17 |
-11,41 |
-1,92 |
-1,14 |
0,879273 |
-0,26 |
0,263 |
1,31 |
0,31 |
-11,10 |
|
18 |
-18,87 |
-1,14 |
-1,89 |
-0,50179 |
-2,39 |
2,388 |
1,31 |
0,31 |
-18,55 |
|
19 |
-11,10 |
-1,89 |
-1,11 |
-0,84997 |
-1,96 |
1,961 |
1,31 |
0,31 |
-10,79 |
|
20 |
-18,55 |
-1,11 |
-1,85 |
0,551427 |
-1,30 |
1,303 |
1,31 |
0,31 |
-18,24 |
Рис.7 Переходный процесс по каналу передачи возмущающего воздействия с Neuro-регулятором.
По графику видно что, как и Fuzzy Logic-регулятор, Neuro-регулятор так же не может подавить возмущение на выходе объекта, это связано с тем, что гармонические колебания имеют достаточно большую амплитуду, несмотря на большой период колебаний.
Структурная схема АСР с ПИ – регулятором и графики переходных процессов представлены в Приложении.
Оценки качества регулирования АСР при изменении управляющего воздействия, использующих разные регуляторы сведены в таблицу:
|
Регулятор |
Установив состояние ∆YО∞ |
Статическ ошибка ∆H∞ |
Время переходного процесса, n |
Перерегулирование σ , % |
Затухание за период ξ, % |
|
ПИ |
|||||
|
Fuzzy |
|||||
|
Neuro |
Перерегулирование:
![]()
Затухание за период:
![]()
В курсовой работе было осуществлено имитационное моделирование АСР с тремя типами регуляторов: ПИ-регулятор, FuzzyLogic и Neuro - регулятор. По результатам полученных переходных процессов по каналам управления и возмущения для всех типов регуляторов, можно сделать вывод, что в типовых процессах, которые достаточно изучены, для которых могут быть получены математические модели объектов, применение FuzzyLogic и Neuro - регуляторов нецелесообразно. Они не могут обеспечить требуемое качество АСР по сравнению с ПИ-регулятором. Если сравнивать только FuzzyLogic и Neuro-регулятор то в результате работы лучший результат по каналу передачи управляющего воздействия был получен с Neuro - регулятором, возможно, это обусловлено выбранными выходными лингвистическими переменными. Ни один из представленных регуляторов не справляется с гармоническим возмущением, однако здесь лучше всего показал себя ПИ – регулятор. Применение FuzzyLogic и Neuro-регулятора обосновано в процессах
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.