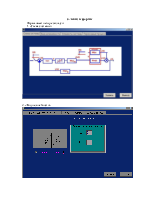
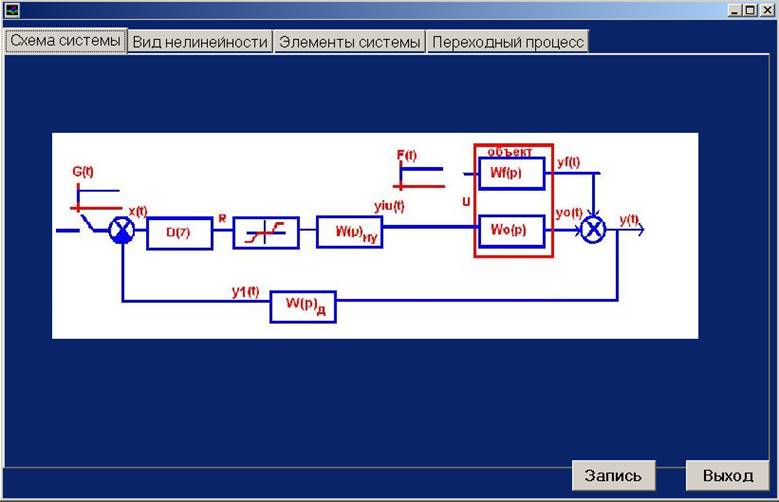
1. Структурная схема моделируемой системы управления
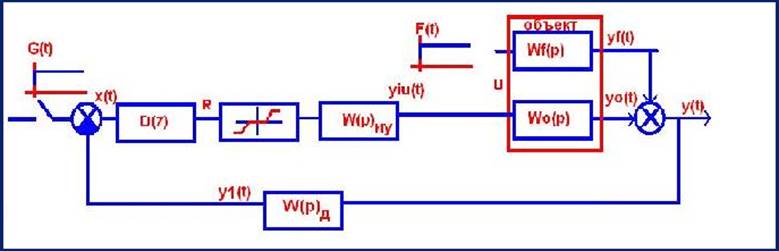
Рис.1. Структурная схема системы.
2. Математическое описание исходных данных
Моделируемая система
D(z)=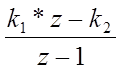 - дискретная передаточная функция ПИ-регулятора;
- дискретная передаточная функция ПИ-регулятора;
Wим(р)=kим – передаточная функция исполнительного механизма;
Wpo(p)=kpo – передаточная функция регулирующего органа;
Wo(p)= - передаточная
функция объекта по каналу управления;
- передаточная
функция объекта по каналу управления;
Wд(р)=kд – передаточная функция датчика;
Wf(p)= - передаточная
функция объекта по каналу возмущения;
- передаточная
функция объекта по каналу возмущения;
Wфэ(p)= - передаточная
функция фиксатора нулевого порядка.
- передаточная
функция фиксатора нулевого порядка.
A(t)=A*1[t] – сигнал задающего воздействия
Af(p)= - сигнал
возмущения на вход объекта управления
- сигнал
возмущения на вход объекта управления
Нелинейный элемент.
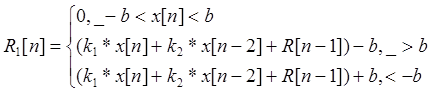
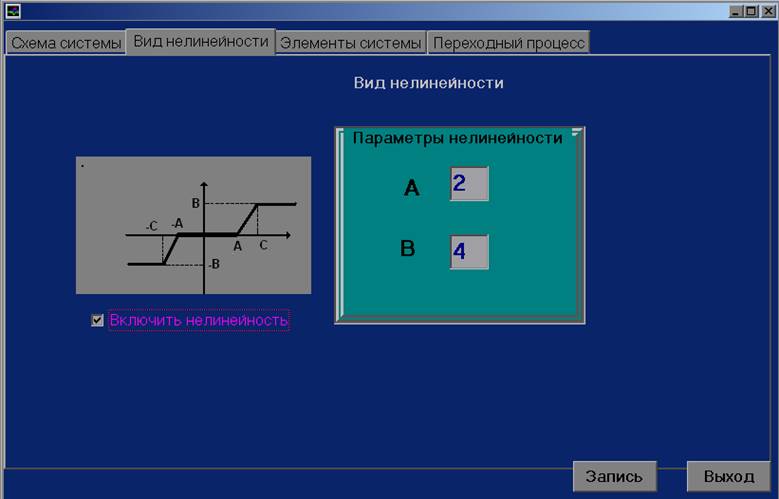
В моделируемой системе нелинейная характеристика присутствует в дискретном регуляторе. Вид нелинейности – «реальное ограничение». (рис.2.)
Задана нелинейность дискретного регулятора, которая имеет вид:
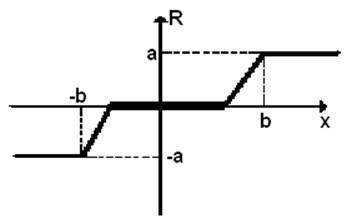
Рис.2. Вид нелинейности – “реальное ограничение”
c:=(b/x[n])+a;
If (R[n]<a) and (R[n]>-a) Then Un[n]:=0;
If R[n]<-a then Un[n]:=(R[n]+a)*Kpo;
If R[n]<-c then Un[n]:=-b;
If R[n]>c then Un[n]:=b;
U[n]:=Kum*Kpo*Un[n]
|
3. Определение дискретной модели непрерывной части системы и
соответствующего разностного уравнения.
1. Нахождение дискретной передаточной функции объекта управления:
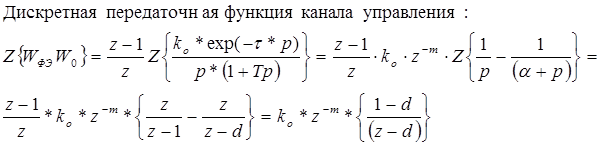
Запишем разное уравнение, которые описывают работу объекта по каналу управления:
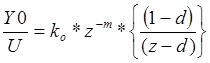
y0[n]=y0[n-1]*d - k0*U[n-m-1]-k0*d*U[n-m-1];
4. Определение непрерывной и дискретной модели нелинейной характеристики заданного элемента системы.
В моделируемой системе нелинейная характеристика присутствует в дискретном регуляторе. Вид нелинейности – «реальное ограничение». (рис.2.)
Задана нелинейность дискретного регулятора, которая имеет вид:
Рис.2. Вид нелинейности – “реальное ограничение”
c:=(b/x[n])+a;
If (R[n]<a) and (R[n]>-a) Then Un[n]:=0;
If R[n]<-a then Un[n]:=(R[n]+a)*Kpo;
If R[n]<-c then Un[n]:=-b;
If R[n]>c then Un[n]:=b;
U[n]:=Kum*Kpo*Un[n]
Для программирования данной системы необходимо перейти от дискретных функций элементов системы к разностным уравнениям.
1. Получим разностное уравнение для ПИ – регулятора:
y0[n]=y0[n-1]*d - k0*U[n-m-1]-k0*d*U[n-m-1
2. Уравнение возмущения на вход объекта
yf[n]=(cf*kf*(1-exp(-n*Tdis/Tf)))
3.Сумматор
![]()
4. Уравнение датчика
![]()
4.Сигнал ошибки рассогласования
![]()
5 .Уравнение регулятора

![]()
6.Уравнение исполнительного механизма
S[n] = Kим*R[n]
7.Уравнение регулирующего органа
U[n] = Kpo*S[n]
Анализируя все переменные, которые присутствуют в цикле, можно сделать вывод, что на все переменные должны задаваться массивом.
|
y0[n]
x[n]
U[n]
|
||||
yf[n]
y[n]
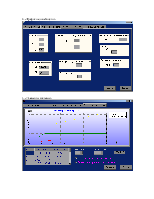
6.Эскизы формы
Форма имеет четыре закладки:
1. «Схема системы»:
2. «Вид нелинейности»
3. «График нелинейности»
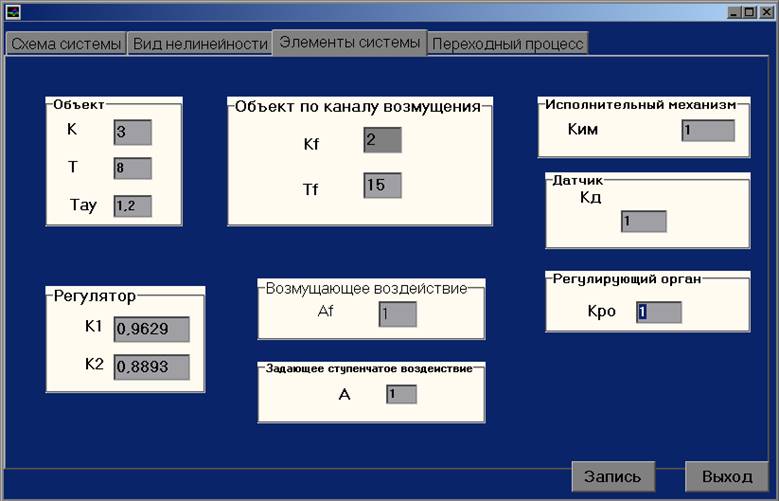
4. «Элементы системы»
7.Коды программы
procedure TForm1.FormCreate(Sender:TObject);
Begin
With stringgrid2 do
begin
cells[0,0]:='Такт';
cells[1,0]:='Система';
cells[2,0]:='Выход нел.';
cells[3,0]:='Вход нел.';
Rowcount:=2;
end;
End;
procedure TForm1. Edit1Change(Sender: TObject);
Var
N,I:Integer;
Begin
Series1.Clear;
N:=StrToInt(ComboBox3.Text);
For I:=1 to N do
With StringGrid2 do
Begin
Cells[0,0]:=' ';
Cells[1,0]:=' ';
Cells[2,0]:=' ';
Cells[3,0]:=' ';
RowCount:=3;
End;
End;
procedure TForm1.Button2Click(Sender: TObject);
begin
Close;
end;
procedure TForm1.Edit2Change(Sender: TObject);
Var
N,I:Integer;
Begin
Series1.Clear;
N:=StrToInt(ComboBox3.Text);
For I:=1 to N do
With StringGrid2 do
Begin
Cells[0,0]:=' ';
Cells[1,0]:=' ';
Cells[2,0]:=' ';
Cells[3,0]:=' ';
RowCount:=3;
End;
End;
//Расчет системы
procedure TForm1.Button3Click(Sender: TObject);
Var
K1,K2,K,T,Tau,Tdis,Kum,Kpo,Kd,Sig,a,b,c,y,y1,yf,cf,kf,tf,r,un,un0:real;
i,n,m:Integer;
U:array of real;
Yo:array of real;
X:array of real;
Begin
a:=StrToFloat(Edit1.Text);
b:=StrToFloat(Edit2.Text);
K1:=StrToFloat(Edit7.Text);
if k1=0 then
begin
messagedlg('Неправильно введены настройки регулятора: к1',mterror,[mbok],0);
exit;
end;
K2:=StrToFloat(Edit8.Text);
if k2=0 then
begin
messagedlg('Неправильно введены настройки регулятора: к2',mterror,[mbok],0);
exit;
end;
K:=StrToFloat(Edit9.Text);
if k=0 then
begin
messagedlg('Неправильно введены параметры объекта: к',mterror,[mbok],0);
exit;
end;
Tau:=StrToFloat(Edit10.Text);
if tau=0 then
begin
messagedlg('Неправильно введены параметры объекта: тау',mterror,[mbok],0);
exit;
end;
t:=strtofloat(edit13.Text);
if t=0 then
begin
messagedlg('Неправильно введены параметры объекта: Т',mterror,[mbok],0);
exit;
end;
kf:=strtofloat(edit3.text);
Tf:=strtofloat(edit4.text);
Cf:=strtofloat(edit14.text);
Kum:=StrToFloat(Edit5.Text);
if Kum=0 then
begin
messagedlg('Неправильно введены параметры системы: Ким',mterror,[mbok],0);
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.