
4. Синтез и анализ системы электропривода.
4.1. Синтез функциональной схемы электропривода
Синтез системы управления электропривода заключается в выборе структуры системы автоматизированного управления, схем и параметров регулирующих устройств, необходимых для обеспечения электроприводом требуемых статических и динамических показателей, как в отношении механических координат, так и в отношении электрических и энергетических.
Есть два принципа построения автоматизированных электроприводов – с разомкнутыми и замкнутыми системами управления. В электроприводах с разомкнутой системой управления уровень управляющего воздействия определяет уровень выходной координаты, но, кроме того, на формирование выходной координаты оказывают влияние различные внешние возмущения – различные помехи, колебания питающего напряжения, нагрузка электропривода и так далее. Другими словами, разомкнутая система не обеспечивает отстройку выходной величины от внешних возмущений, проявляющихся в изменении уровня выходной координаты. Электропривода с замкнутой системой управления в свою очередь подразделяются на три группы: системы, работающие по принципу компенсации отклонения, системы, работающие по принципу компенсации возмущения и комбинированные системы. Характерной чертой систем работающих по принципу компенсации отклонения является подача на вход электропривода сигнала обратной связи, пропорционального выходной координате. Этот сигнал сравнивается с задающим сигналом и результирующий сигнал – сигнал рассогласования является входным управляющим сигналом для электропривода. Если вследствие действия возмущения выходная величина изменится, то соответствующим образом изменится и сигнал рассогласования, а это приведёт к изменению режима электропривода и восстановлению с определённой точностью прежнего уровня выходного сигнала. В системах реализованных по принципу компенсации возмущающего воздействия, вместе с задающим сигналом на вход подаётся сигнал пропорциональный величине возмущающего воздействия, в результате чего суммарный сигнал обеспечивает такое управление электроприводом, при котором осуществляется компенсация возмущений. В электроприводах с комбинированной системой управления в равной мере используются оба перечисленных способа.
Подведём краткие итоги вышесказанному. Разомкнутая система в нашем проектировании использоваться не может, так как система не отрабатывает ошибку, привнесённую внешними возмущениями. Систему с компенсацией возмущающего воздействия применять нежелательно, так как, во-первых, в подобных системах нельзя компенсировать все действующие на электропривод возмущения, а, во-вторых, нет простых и надежных датчиков нагрузки электропривода. По этой же причине откажемся и от использования комбинированной системы управления. В итоге в качестве принципа регулирования системы управления для дипломного проектирования примем регулирование по отклонению.
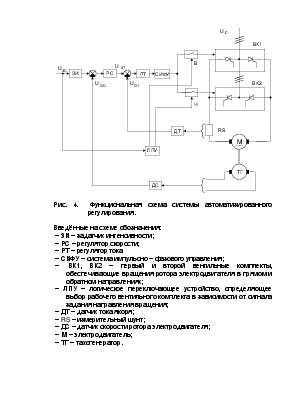
В настоящее время в электроприводе при создании систем регулирования нашел широкое применение принцип последовательной коррекции или так называемого подчинённого регулирования. Сущность его заключается в следующем. Объект регулирования представляется в виде последовательно соединённых звеньев, выходными параметрами которых являются Существенные координаты объекта, например ток, напряжение, ЭДС, магнитный поток, момент, скорость, положение. Для управления каждой из этих координат организуется отдельный регулятор, образующий с объектом регулирования контур, замкнутый соответствующей обратной связью. Регуляторы соединяются последовательно, так что выход одного является входом другого. При этом замкнутые контуры регулирования образуют систему, в которой имеется внутренний контур управления, состоящий из регулятора и одного из звеньев объекта управления, первый внешний контур, включающий в себя внутренний контур и следующее звено объекта управления, второй внешний контур, включающий в себя первый и следующее звено объекта управления т.д. Выходной сигнал каждого внешнего контура является задающим для последующего, заключённого внутри него контура. Таким образом, каждый внутренний контур регулирования подчинён соответствующему внешнему. Преимущества подчиненного регулирования по сравнению с параллельной коррекцией заключается в упрощении решения задачи ограничения координат, облегчения наладки и, следовательно, сокращения сроков пуска объектов, в широких возможностях унификации узлов управления различными объектами. Недостаток – некоторый проигрыш по быстродействию, связанный с последовательным воздействием на систему через внутренние контуры, а не сразу на входное звено объекта управления.
В качестве основной регулируемой координаты электропривода кроме рывка ранее называлось перемещение механизма линейки, но поскольку величина допустимой погрешности перемещения при регулировании перемещения достаточно велика, а скорость механизма непосредственно связана с перемещением, то при условии достаточно точного отслеживания величины скорости электродвигателя, вместо контура регулирования положения при проектировании системы можно просто ввести контур регулирования скорости, тем более что его практическая реализация является делом более простым, чем реализация контура регулирования положения. Поскольку электродвигатель имеет достаточно большую мощность РНОМ=37 кВт, и величина его номинального тока превышает сотню ампер, то работающий в режиме пусков – торможений электропривод будет оказывать негативное воздействие на сеть бросками тока. Это негативное влияние можно в некоторой степени ограничить, если заставить электродвигатель обеспечивать определённое желаемое качество переходных процессов. Для этого необходимо ввести в систему управления контур регулирования тока якоря. За счёт действия контура тока система быстро отрабатывает возмущающее воздействие в виде изменения напряжения питания сети. Если быстродействие контура тока велико по сравнению с быстродействием контура скорости, то прежнее значение напряжения на якоре электродвигателя будет восстановлено за счёт изменения напряжения на выходе преобразователя и отклонение скорости вследствие изменения напряжения питающей сети будет небольшим, таким образом, контур тока будет выполнять две основные функции:
1. ограничение максимально допустимого тока в переходных процессах;
2. быстрая отработка возмущающего воздействия со стороны напряжения сети.
В качестве итога можно сказать, что в данном дипломном проектировании
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.