5. Динамический расчет канала якоря
Расчет динамики САУ заключается в определении показателей качества САУ во время переходного процесса: перерегулирование ׁσ%, показатель колебательности М, время регулирования (длительности переходного процесса) tРЕГ, и сравнение их с заданными или типовыми.
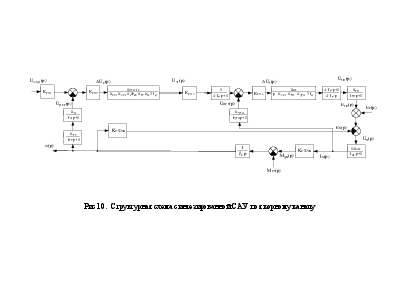
Расчет переходных процессов в оптимизированной САУ по управлению и по возмущению будет производиться на ЭВМ при использовании программы SMED. Необходимо структурную схему (рис.10) преобразовать в схему удобную для работы со SMED (рис.11)
Рис.10. Структурная схема синтезированной САУ по якорному каналу
Рис. 11. Преобразованная структурная схема канала якоря для программы SMED
В данной схеме введены следующие обозначения:
К1 = КСУ1 = 0,5;

К3 = КСУ4 ∙ RЯΣ ∙ КТП = 1 ∙ 0,674 ∙ 20 = 13,48
К5 = КДТЯ = 0,069
К6 = КЕФВN = 0,603
К7 = КТГ = 3,12∙10-3
К8 = КФ = 10,192
Т1 = 4 ∙ Тµ1 = 0,046 с
Т2 = КСУ4 ∙ КТП ∙ КДТЯ ∙ 2Тµ1 = 1 ∙ 20 ∙ 0,069 ∙ 2 ∙ 11,51 ∙ 10-3 = 0,0318 с
Т3 = ТТП = 2,0 ∙ 10-3 с
Т4 = ТЯΣ = 5,01 ∙ 10-3 с
Т5 = ТДТЯ = 4,5 ∙ 10-3 с
Т6 = JΣ = 0,412 кг∙м2
Т7 = ТТГ = 5,3 ∙ 10-3 с
Т8 = ТФ = 5,3 ∙ 10-3 c
Произведя расчеты в программе SMED, получили следующие зависимости для контура тока:
Анализ качества настройки регулятора
После расчета переходных процессов можно оценить правильность синтеза структуры регуляторов и расчета их параметров, т.е. оценить качество настройки регуляторов.
Улучшенный симметричный оптимум (УСО) устраняет статические ошибки по управлению и по возмущению, перерегулирование (σ% = 8,1%), время регулирования tрег ≤ 13,3 ∙ 2 ∙ Тμ..
Технический оптимум (ТО) обеспечивает отсутствие статической ошибки по управлению (по возмущению статическая ошибка может быть или не быть), перерегулирование (σ% = 4,3%), быстродействие tРЕГ ≤ 4,2 ∙ 2 ∙ Тμ..
Эти показатели можно взять за контрольные и путем сравнения их с полученными по переходным процессам, сделать вывод по качестве настройки регуляторов.
На рисунках 12 – 17 представлены рассчитанные переходные процессы в канале регулирования электродвигателя со стороны якоря. Малые постоянные времени контура тока и контура скорости:
Тμ1 = 0,01151 с, Тμ2 = 0,0336 с.
Так как регулятор тока настроен на УСО, то:
tРЕГ1 = 13,3 ∙ 2 ∙ Тμ1 = 13,2 ∙ 2 ∙ 0,01151 = 3,06 с
Из переходных характеристик получим при обработке задания (рис.12):
tРЕГ1 = 0,17 с, т.е. быстродействие контура тока лучше ожидаемого.
Перерегулирование контура тока:
 , что меньше
необходимого перерегулирования при оптимизации на УСО.
, что меньше
необходимого перерегулирования при оптимизации на УСО.
Дополнительно определим время первого перехода и время достижения максимума при обработке управления:
tПП1 = 0,087 с,
tmax1 = 0,11 c.
Контур скорости настроен на ТО, следовательно:
tРЕГ2 = 4,2 ∙ 2 ∙ Тμ2 = 4,2 ∙ 2 ∙ 0,0336 = 0,47544 с
Из переходных характеристик получим при обработке задания
(рис. 15):
tРЕГ2 = 0,46 с, т.е. быстродействие контура скорости оказалось лучше ожидаемого.
Перерегулирование контура скорости:
 , что меньше
необходимого перерегулирования при оптимизации на ТО.
, что меньше
необходимого перерегулирования при оптимизации на ТО.
Дополнительно определим время первого перехода и время достижения максимума при обработке управления:
tПП2 = 0,21 с,
tmax2 = 0,26 c.
Видно, что быстродействие контура тока и контура скорости лучше, чем ожидаемое время регулирования.
Перерегулирование контура тока и контура скорости меньше планируемого. Можно сделать вывод в хорошей настройки регуляторов скорости и тока.
На рис.12. изображен переходной процесс внутреннего контура при скачке напряжения задания тока Uзад. Увеличение напряжения задания влечет за собой увеличение тока. Причем, вид переходного процесса должен соответствовать настройки на УСО (σ% = 8,1%, быстродействие tРЕГ ≤ 13,3 ∙ 2 ∙ Тμ.1). В нашем случае мы видим, что характеристика соответствует требуемому виду.
На рис.13. изображен переходной процесс внутреннего контура при скачке момента нагрузки Мст. При увеличении момента нагрузки, ток в якоре также не изменяется, т.к. настройка на УСО дает отсутствие статических ошибок по управлению и возмущению. Что мы и видим на рисунке.
На рис.14. изображен переходной процесс внутреннего контура при скачке напряжения сети Uс. Так как мы настраиваем свой регулятор так, чтобы на ток не влияли внешние воздействия, то ток после завершения переходного процесса восстанавливает свое прежнее значение.
На рис.15. изображен переходной процесс всего канала при скачке Uзад. Так как задание воздействует на частоту вращения, то увеличение напряжения задания повлечет за собой увеличение частоты вращения. При этом ток не должен изменятся, что мы и видим на рисунке.
На рис.16. изображен переходной процесс всего канала при скачке Мст. Так как увеличилась нагрузка, должен увеличится ток, чтобы развить момент, компенсирующий момент нагрузки. Так как основным выходным параметром двигателя является частота вращения, то после небольших колебаний частота вращения должна стать прежней. На графике видно, что скорость после завершения переходного процесса, имеет несколько меньшую величину по отношению к первоначальному значению. Это объясняется тем, что при оптимизация на ТО статическая ошибка по возмущению может быть, а может и не быть.
На рис.17. изображен переходной процесс всего канала при скачке Uс. Увеличение напряжения сети не оказывает значительного влияния на окончательную частоту вращения и на ток. В конце переходного процесса эти параметры останутся прежними. Изменение сетевого напряжения вызовет колебание частоты вращения и тока.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.