Передаточная функция апериодического регулятора повышенного порядка АР+1, ограничивающего первый импульс управляющего воздействия так,что u(1) £ u(0):
где 1/a = 1 - 1/ (q0Sbi)
Параметры такого регулятора определяют по следующим соотношениям:


Из передаточных функций АР-регуляторов следует, что их параметры рассчитываются по известным параметрам объекта регулирования и не требуют покоординатного поиска настроек по качеству переходного процесса.
Например, для объекта второго порядка с передаточной функцией

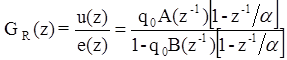
передаточная функция апериодического регулятора имеет вид
q0 = 1/(0.13872+0.0889) = 4.3933
q1 = - 4,5514 p1 = 0.6094
q2 = 1,1581 p2 = 0.3906

Рекуррентная формула для расчета переходного процесса изменения управляющей величины u(k) имеет следующий вид:
u(k) = q0[b1u(k-1-d) +. . .+ bm u(k-m-d) + e(k)+ a1e(k-1) + . . .+ am e(k-m)]
Имеем передаточную функцию объекта

Имеем передаточную функцию регулятора:

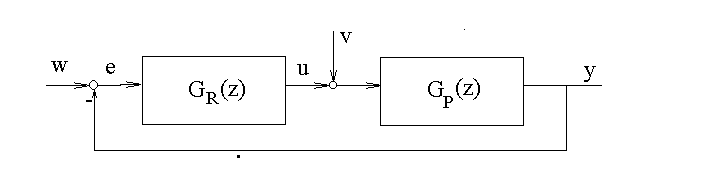
1. Принимаем единую для всех процессов регулирования форму задающего сигнала. Сигнал должен иметь два уровня такой длительностью, чтобы выход на каждом уровне достигал установившегося значения, а в конце регулирования в последнем расчетном уравнении значения величин на всех предыдущих интервалах были бы одинаковыми.
2. На k-ом такте квантования рассчитываем (или измеряем) выходную переменную
![]()
3. От задающей переменной w(k) вычисляем (или измеряем) ошибку регулирования на входе регулятора
e(k) = w(k) - y(k)
4. По ошибке регулирования вычисляем управляющую переменную на выходе регулятора
u(k) = q0[b1u(k-1-d) +. . .+ bm u(k-m-d) + e(k)+ a1e(k-1) + . . .+ am e(k-m)
5. По результатам расчета строим таблицу и график процесса регулирования w(k), u(k), y(k),
Показатели качества переходного процессапозволяют объективно сравнивать между собой различные процессы регулирования
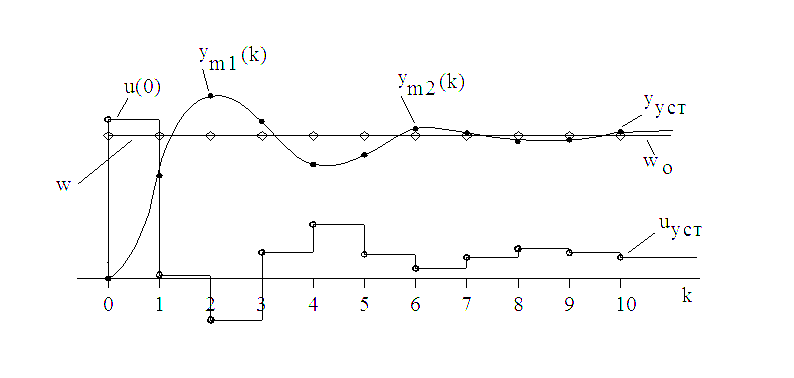
Рис.1. Пример процесса регулирования.
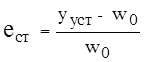
Статическая ошибка регулирования определяет разность между установившимся
значением регулируемого параметра yуст и его заданным значением wo
Динамическая ошибка регулирования равна наибольшему отклонению регулируемой величины ym1(k) от значения задания w(k)
Время регулирования tрег определяется как время, за которое разность между текущим значением регулируемого параметра и его установившимся значением становится меньше допустимого отклонения [e(k) ]< 0.03wуст.
Применяются также дополнительные показатели:
Степень затухания системы - характеризует быстроту затухания колебательного процесса и определяется по формуле:
где ym1(k) и ym2(k) - две амплитуды для рядом расположенных экстремумов переходного процесса. Очевидно, что степень затухания изменяется в пределах от 0 до 1, а для неустойчивых процессов - отрицательная.
Начальное значение управляющей переменной при ступенчатом изменении сигнала задания w(0): Duнач = u(0) / uуст . Этот показатель характеризует затраты на регулирование.
Интегральные критерии качества переходного процесса в отличие от прямых показателей (рассмотренных выше), дают обобщенную оценку процесса регулирования.
В автоматике используют несколько видов интегральных критериев
 - сумма квадратов ошибок,
- сумма квадратов ошибок,
 - сумма абсолютных значений ошибок,
- сумма абсолютных значений ошибок,
 - сумма произведения абсолютных значений ошибок на время.
- сумма произведения абсолютных значений ошибок на время.
Наиболее часто используют критерий I2, при суммировании которого каждая ошибка выхода увеличивается пропорционально самой себе. Таким образом, этот критерий минимален если нет больших ошибок, а малые ошибки долго незатухающего процесса, когда e(k)®0, для критерия I2 не существенны. Переходные процессы с минимальным критерием I2 отличаются малыми динамическими ошибками, но относительно слабым затуханием и, следовательно, большим временем регулирования. Поэтому для обеспечения лучшего затухания следует использовать критерии I4 или I3.
Особый интерес представляет критерий I4, в котором каждая ошибка выхода e(k) увеличивается пропорционально номеру такта k. Таким образом, этот критерий минимален если малы ошибки, далеко отстоящие от начала процесса, а первые большие ошибки для критерия I4 несущественны. Переходные процессы с минимальным критерием I4 отличаются малым временем регулирования.
Критерии качества управления позволяют сравнивать процессы регулирования с учетом качества работы регулятора (ограничения максимумов управляющих переменных), а также переходные процессы с регуляторами различных типов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.