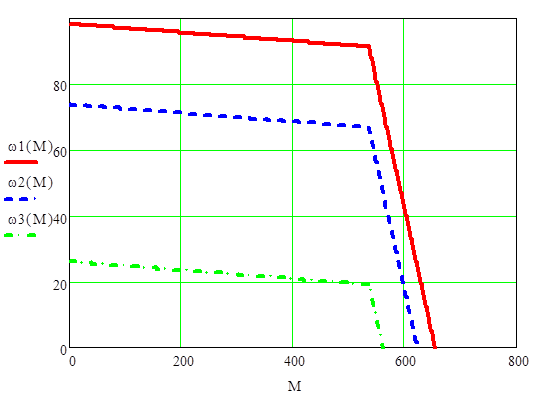
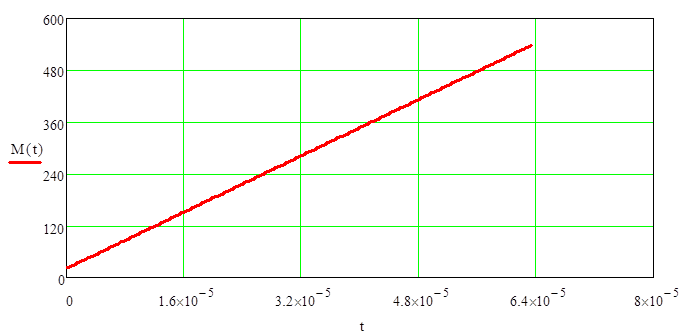
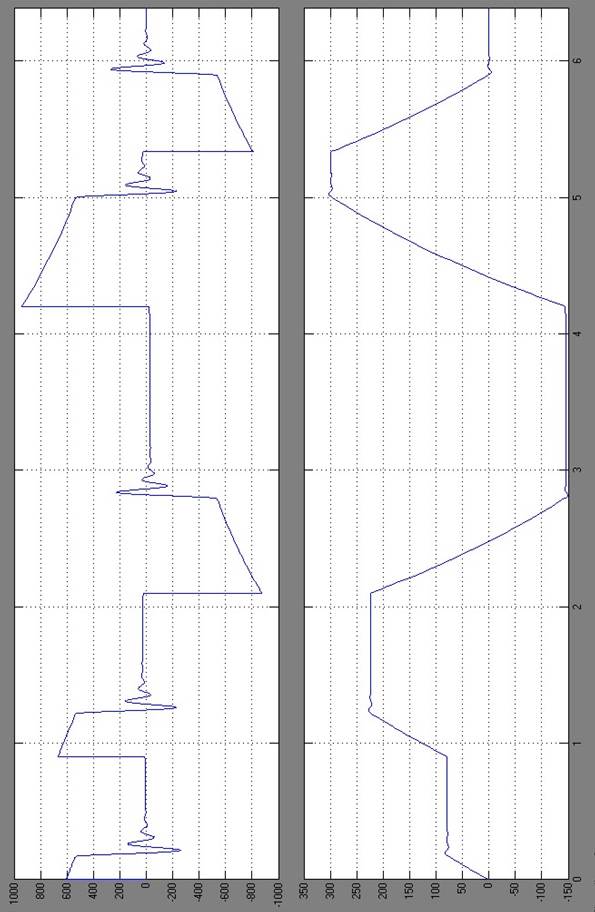
Статические характеристики разомкнутого ЭП приведены на рис 7.1
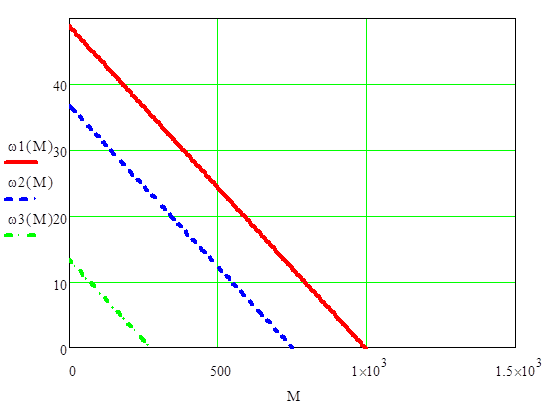
Статического характеристики замкнутого ЭП приведены на рис 7.2
|
|
Рис. 7.1. Статическая характеристика замкнутого ЭП
|
|
Рис. 7.2. Статическая характеристика разомкнутого ЭП
8. Анализ переходных процессов.
Расчет и анализ переходных процессов за цикл работы механизма позволяет определить продолжительность процессов, закон изменения скорости, путь проходимый рабочим органом, а также позволяет провести уточненную проверку двигателя по нагреву и перегрузочной способности.
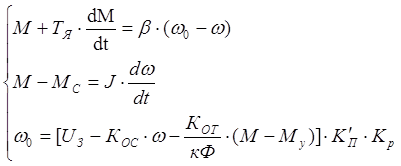
Исходная система уравнений:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

 ;
;

 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

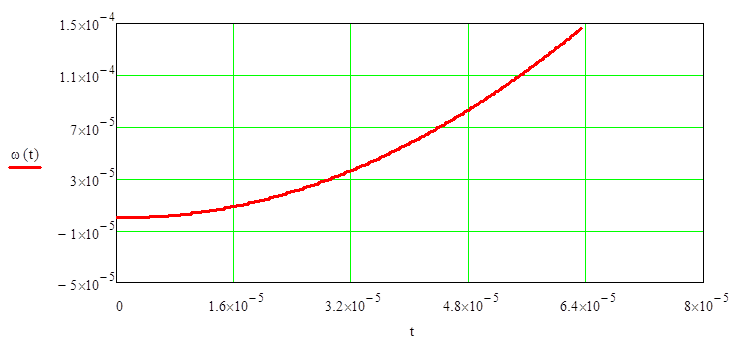
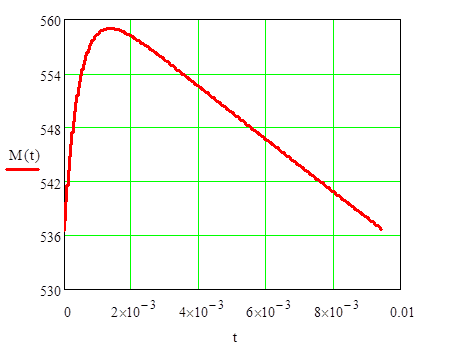
Рассчитаем аналитически переходные процессы М(t) и ω(t).
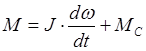
Первый этап: время, до которого якорь находился в неподвижном состоянии, т.е. М≤MC, ω=0, КОС=0, КОТ=0.
Решение данного уравнения:
Первый этап завершится в момент времени:

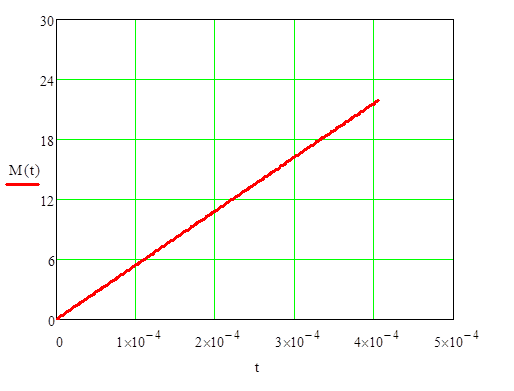
Подставляя в решение уравнения значение времени t от 0 до t1=0.0004057c, построим кривую М(t) до значения MC1=21.862Н·м.
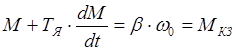
Второй этап: ротор начинает разворачиваться; на этом этапе система становится замкнутой, т.к. появляется обратная связь по скорости, в результате:
МС<M; ω≠0; KOC≠0; KOT=0; МНАЧ=МС, ωНАЧ=0.


![]()
p1=-14.706+j·109.496; p2=-14.706- j ·109.496
Решения данного уравнения:

α=14.706; ΩР=109.496; ωm=12.748 рад/с; UЗ=2.055 В


![]()


![]()

Подставляя в решение уравнений значения времени, построим кривые ω(t) и М(t).
|
|
|
|
Переходной процесс на втором этапе закончится, когда момент достигнет значения МУ=536.641 Н·м. Это произойдет при t2=0.00006342 с.
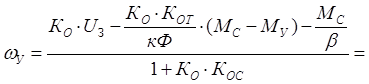
Третий этап: на этом этапе момент превышает МУ и работает обратная связь по току:
МНАЧ=МУ=536.641; ωНАЧ=ω2=0.00006342 рад/с; КОС≠0; КОТ≠0.


![]()
![]() ;
; ![]()
Решения данного уравнения:
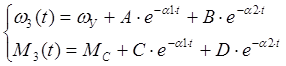
α1=5.57; α2=2217; ωm=6.087 рад/с; UЗ=2.055 В.


![]()
![]()



![]()

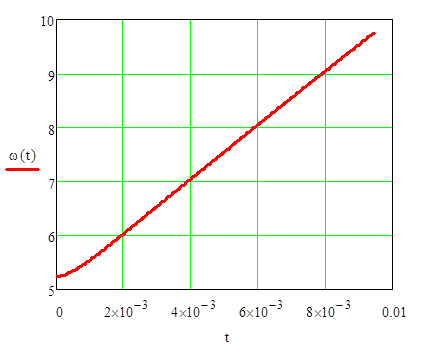
Подставляя в решение уравнений значения времени, построим кривые ω3(t) и М3(t). Второй и третий этапы будут повторяться до момента времени t=0.009448c, при котором скорость рабочего значения.
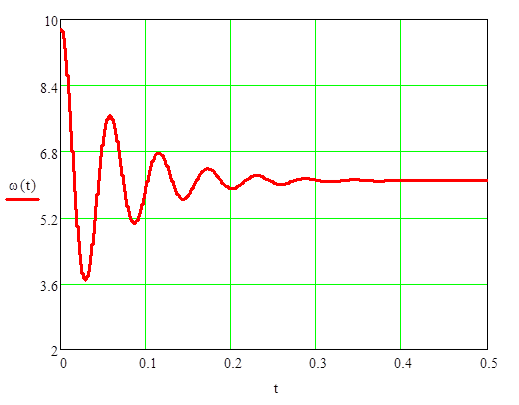
Четвёртый этап: на этом этапе скорость превышает ωраб и в системе работает обратная связь по скорости.
М<МУ; ωНАЧ=9.7546 рад/с; КОС≠0; КОТ=0.

![]()

![]()
р1=-14.706+j·109.566; р2=-14.706-j·109.566
Решения данного уравнения:

α=14.706; Ωр=109.566; ωНАЧ=9.7546 рад/с; UЗ=2.055 В.

![]()
![]()


![]()

Подставляя в решение уравнения значение времени, построим кривые ω4(t) и M4(t) до установившегося значения.
![]()
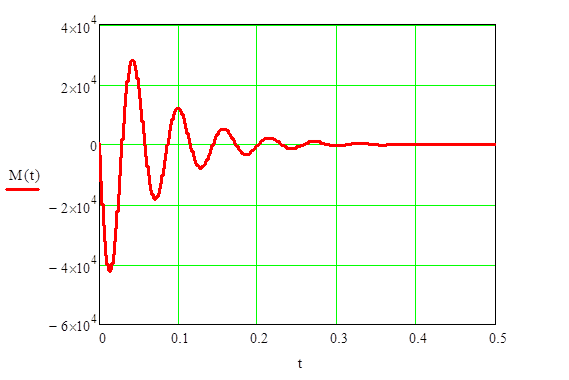
Как видно из графиков скорости и момента, скорость может быть больше или меньше рабочей скорости ωраб, а момент изменяет свое значение относительно момента уставки МУ.
![]()
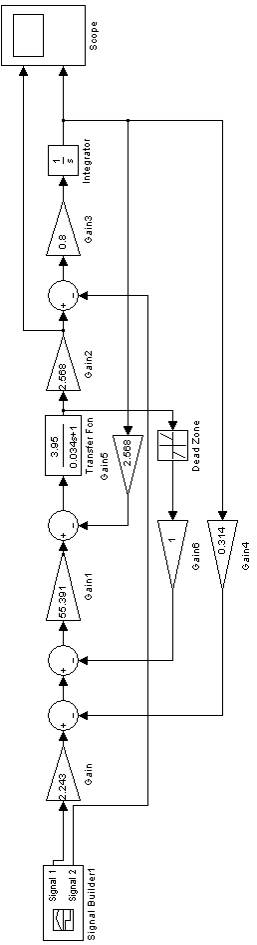
Рис. 8. Модель для расчета переходных процессов за цикл работы.
![]() 9. Окончательная проверка двигателя по нагреву и перегрузочной
способности.
9. Окончательная проверка двигателя по нагреву и перегрузочной
способности.
Проверку двигателя по нагреву проведем с использованием метода эквивалентных величин.
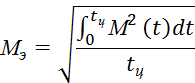
Рассчитаем эквивалентный момент в Matlab Simulink следующим образом (см. рис. 11).
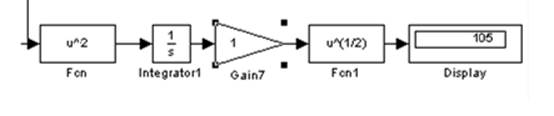
Рис. 10. Фрагмент модели электропривода в Matlab Simulink реализующий расчет эквивалентного момента.
Т.к. эквивалентный момент меньше номинального, то двигатель проходит по нагреву.
![]()
10. ![]() Расчет энергетики электропривода.
Расчет энергетики электропривода.
КПД электропривода можно рассчитать следующим образом
где А1 - энергия, потребляемая ЭП за цикл работы;
А2 - энергия, выделяемая ЭП за цикл работы.
Значения А1 и А2 найдем в Matlab Simulink (см. рис. 11).
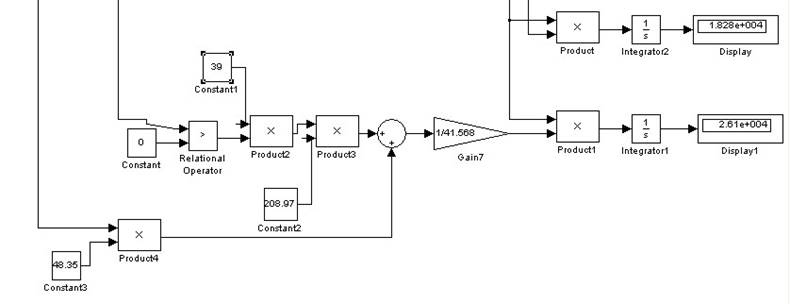
В
блоке Relational Operator
происходит сравнение сигнала ОС по току с нулем и если сигнал ОС по току
становиться больше нуля (включена ОС по току), то на выходе Relational Operator
появляется значение «1», в противном случае – «0». Т.о. получаем зависимость КТ(t). И после
блока Product2 имеем ![]() .
.
На вход блока Product3 подается сигнал UЗС(t)⋅K1.
В итоге на вход блока Product4 подается значение скорости идеального холостого хода
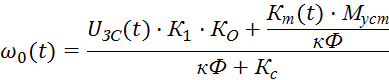
и текущего момента M(t).
Блок Product перемножает значение текущей скорости ω(t) и текущего момента M(t).
После интегрирования имеем значение потребляемой и выделяемой энергии.
Т.о. КПД электропривода составит

![]() 11. Схема
управления ЭП
11. Схема
управления ЭП
На рисунке 12 изображена схема управления ДПТ для рольганга.
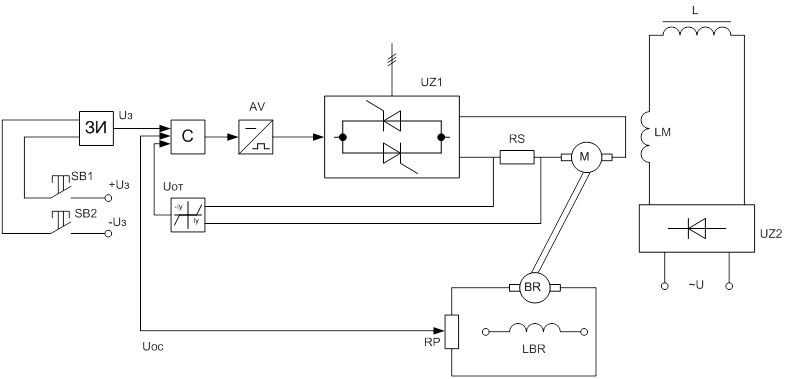
Рис. 12. Принципиальная схема управления ДПТ.
Якорь ЭД питается от реверсивного мостового ТП, регулирование выпрямленным напряжением ТП (UZ1) осуществляется с помощью СИФУ (AV).
ЭП имеет отрицательные обратные связи:
- по скорости;
- по току (с отсечкой).
![]() Заключение
Заключение
В данном курсовом проекте спроектирован электропривод рабочего рольганга с системой регулирования скорости электродвигателя ТП - Д путем изменения напряжения якоря.
Диапазон регулирования данного электропривода D = 5.29. Был выбран электродвигатель типа Д41 с PН = 16 кВт и ωН = 690 рад/с. На основе данных ЭД и требований к электроприводу был выбран ЭП ЭПУ1-2-4027П-УХЛ4. Исходя из требований , в системе принимается обратная связь по скорости и отсечка по току, предназначенная для регулирования момента в ходе пуска электропривода. В результате расчетов статических характеристик был установлен
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.