практике чаще всего приходится сталкиваться с ухудшением охлаждения при пуске и торможении двигателя, принимая, что скорость изменяется линейно:
где β0 – коэффициент, учитывающий ухудшение условий охлаждения при неподвижном роторе (якоре), зависящего от исполнения двигателя.
β0 = 0,95, поскольку двигатель Д812 закрытого исполнения без принудительного охлаждения, тогда:

![]() ,где
,где
Кп, Кт – количество подъемов и торможений за цикл;
Кпод, Ксп – количество остановок при подъеме и спуске;
![]() - коэффициенты ухудшения
теплоотдачи при пуске, торможении, неподвижном якоре.
- коэффициенты ухудшения
теплоотдачи при пуске, торможении, неподвижном якоре.
![]() ,
,
![]()


Электродвигатель подходит по нагреву.
Проверка электродвигателя по перегрузочной способности проводится по приближенной нагрузочной диаграмме:
![]() , где
, где ![]() ,
,
![]() = 3,5 – перегрузочная способность ЭД.
= 3,5 – перегрузочная способность ЭД.
![]()
![]()
![]()
Электродвигатель подходит по перегрузочной способности.
6. Выбор силового оборудования и расчёт параметров системы электропривода
Выбор трансформатора производим по требуемым номинальным напряжению и току преобразователя.
Выбираем из справочника трансформатор: ТСП-63/0,7-УХЛ4
Параметры трансформатора приведены в табл. 1.
Таблица 1. Справочные данные трансформатора
|
Номин. мощность, кВ*А |
Напр. сетевой обмотки, В |
Вентильная обм. |
Преобразователь |
Потери, Вт |
Uк % |
Iхх % |
|||
|
Напр. В |
Ток, А |
Напр. В |
Ток, А |
Рхх |
Ркз |
||||
|
58 |
380 |
205 |
164 |
230 |
200 |
300 |
1900 |
5,5 |
5 |
Для трансформатора рассчитываем параметры обмотки фазы, приведенные ко вторичной обмотке:
Активное сопротивление трансформатора:
 , где
, где
m2 – количество фаз.
Полное сопротивление трансформатора:
 , тогда
, тогда
Реактивное сопротивление трансформатора:
![]() .
.
Коммутационное сопротивление:

Индуктивность трансформатора:
Суммарное сопротивление якорной цепи:
![]() , тогда
, тогда
![]()
Постоянная времени якорной цепи:

Электромеханическая постоянная времени:
 , где
, где

7. Расчёт статических характеристик электропривода
Естественная механическая характеристика:
 - скорость идеального холостого хода;
- скорость идеального холостого хода;
![]() ;
;
Мн = 693,1 Н·м.
Естественная электромеханическая характеристика электропривода:

Статизм естественной механической характеристики ЭП:

Статизм механической характеристики для точной остановки :
 , где
, где

 , тогда
, тогда
Система электропривода должна обеспечивать регулирование скорости в диапазоне:
Требуемый статизм механической характеристики ЭП:

Коэффициент передачи преобразователя:
 , где
, где 
Uу – напряжение управления = 10В
Коэффициент усиления замкнутого контура управления скоростью:

![]() - коэффициент передачи обратной связи по
скорости.
- коэффициент передачи обратной связи по
скорости.
Выбираем тахогенератор: ПТ-32/1В ([6], с. 434) с параметрами:
n = 600 об/мин;
Uн = 230 В;

Коэффициент усиления регулятора:

Максимальное напряжение задания:
 , где
, где ![]() ,
,
 , где
, где
![]()

Поскольку ![]() , то выбираем
, то выбираем ![]()
Уточненные коэффициенты регулятора и обратной связи по скорости:
Чтобы ограничить ускорение при пусках, введем обратную связь по току с отсечкой.
Момент стопорения:
![]() , момент
уставки:
, момент
уставки:
![]()
Уравнение механической характеристики замкнутой системы ЭП:

Определим коэффициент обратной связи по току Кот:

Рис. 8. Структурная схема замкнутой системы электропривода.
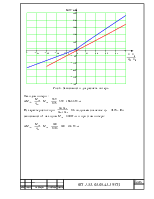
Рис. 9. Статические характеристики: 1- для электропривода;
2-для замкнутой системы; 3-для точной остановки; 4- для разомкнутой
системы
Уставка по току:
11. Составление схемы управления ЭП
На рис. 19. изображена схема управления ДПТ для механизма подъёма мостового крана.
Рис. 19. Принципиальная схема управления ДПТ.
Якорь ЭД питается от реверсивного мостового ТП, регулирование выпрямленным напряжением ТП (UZ1) осуществляется с помощью СИФУ (AV).
ЭП имеет отрицательные обратные связи:
- по скорости;
- по току (с отсечкой).
ЛИТЕРАТУРА
1. Крановый электропривод: Справочник / А.Г. Яуре, Е.М. Певзнер. - М.: Энергоатомиздат, 1988г.
2. Драников В.Г., Звягин И.Е. «Автоматизированный электропривод подъёмно-транспортных машин», М. Высшая школа, 1973 г.
3. Соколов М.М. «Автоматизированный электропривод общепромышленных механизмов.
4. Расчёт грузоподъёмных и транспортирующих машин (Иванченко Ф., Бондарев В. С., и др. – Киев: Высшая школа, 1975 г.).
5. М/ук 2203 Практическое пособие к курсовому проектированию по дисциплине «Теория электропривода», ч. II.
6. М/ук 1821. Практическое пособие к курсовому проектированию по дисциплине «Теория электропривода» ч.I.
СОДЕРЖАНИЕ
Введение………………………………………………………………………..
1. Технологическое описание механизма и его техническая характеристика……………………………………………………………..
2. Расчёт и построение диаграмм скорости и статических нагрузок механизма…………………………………………………………………..
3. Выбор системы электропривода и предварительный выбор электродвигателя…………………………………………………………..
4. Расчёт и построение скоростной и упрощённой нагрузочной диаграмм электропривода…………………………………………………
5. Проверка двигателя по нагреву и перегрузочной способности………...
6. Выбор силового оборудования и расчёт параметров системы электропривода…………………………………………………………….
7. Расчёт статических характеристик электропривода…………………….
8. Расчёт и анализ переходных процессов электропривода за цикл работы………………………………………………………………………
9. Окончательная проверка электродвигателя по нагреву и перегрузочной способности………………………………………………
10. Расчёт энергетики электропривода………………………………………
11. Составление схемы управления и выбор коммутационной аппаратуры…………………………………………………………………
Заключение……………………………………………………………………...
Список литературы……………………………………………………..............
ЗАКЛЮЧЕНИЕ
В результате выполнения курсового проекта был разработан электропривод механизма подъёма мостового крана, который удовлетворяет требованиям, поставленным в задании. Электроприводом обеспечивается необходимая производительность. САУ имеет хорошее быстродействие.
Выбранный электродвигатель серии Д812 прошел проверку по перегрузочной способности и по нагреву.
Выбранный электродвигатель имеет мощность 47 кВт и номинальную скорость вращения 565 об/мин.
Окончательная проверка электродвигателя показала, что двигатель
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.