Момент инерции, следовательно, будет равен:
 (кг·м2)
(1)
(кг·м2)
(1)
где: ρ=7850 кг/м3 – плотность стали;
d и h – диаметр и толщина диска соответственно.
Суммарный момент инерции якоря двигателя с установленным на валу диском будет равна:
![]() (кг·м2)
(2)
(кг·м2)
(2)
Сопротивление якорной цепи, с учётом дополнительных полюсов и приведения к рабочей температуре находим, как
 (Ом)
(3)
(Ом)
(3)
где: 0,3 – коэффициент, учитывающий, что в условиях лаборатории температура двигателя не будет достигать номинального значения из-за непродолжительности работы и нечастых включений;
η=0,8 – КПД двигателя;
Uн и Iн – номинальное напряжение и номинальный ток двигателя соответственно.
Номинальная угловая скорость вращения вала двигателя:
 (c-1)
(4)
(c-1)
(4)
Находим номинальный магнитный поток двигателя:
 (В∙с/рад) (5)
(В∙с/рад) (5)
Далее находим постоянные времени, необходимые для синтеза регуляторов:
Электромеханическая постоянная времени
 (с)
(6)
(с)
(6)
Электромагнитная постоянная времени
 (мс) (7)
(мс) (7)
где Lреакт=0,21∙10-3 Гн – индуктивность реакторов.
3. Синтез регуляторов.
Система управления является однозонной, с подчинённым контуром тока. Необходимо синтезировать регуляторы тока и скорости.
3.1 Синтез регулятора тока.
Постоянная времени регулятора тока:
![]() (с)
(8)
(с)
(8)
Малая постоянная времени контура скорости равна:
![]() (с)
(с)
Проверяем условие пренебрежения обратной связью по ЭДС:
![]() (9)
(9)
![]() (с)
(с)
![]() , следовательно,
условие пренебрежения внутренней обратной связью по ЭДС выполняется, а значит,
передаточная функция регулятора тока будет иметь вид:
, следовательно,
условие пренебрежения внутренней обратной связью по ЭДС выполняется, а значит,
передаточная функция регулятора тока будет иметь вид:
 (10)
(10)
где:
 (11)
(11)
где: Кп=110 – коэффициент передачи преобразователя;
 - коэффициент
передачи обратной связи по току, с учётом того, что при номинальном токе
двигателя Iн напряжение датчика тока Uот будет равно 1,1 вольт.
- коэффициент
передачи обратной связи по току, с учётом того, что при номинальном токе
двигателя Iн напряжение датчика тока Uот будет равно 1,1 вольт.
Следовательно, передаточная функция регулятора тока принимает вид:
 (12)
(12)
3.2. Синтез регулятора скорости.
Передаточная функция регулятора скорости имеет вид:
 (13)
(13)
где:
Кот=0,27 – коэффициент передачи обратной связи по току;
КФ=0,79 (В∙с/рад) – номинальный магнитный поток;
Тм=0,61 (с) – электромеханическая постоянная времени;
Rя=3,22 (Ом) – сопротивление якорной цепи;
Кос – коэффициент обратной связи по скорости, с учётом того, что при номинальной угловой скорости напряжение на датчике скорости будет равно 10 В.
 (В/с-1)
; (14)
(В/с-1)
; (14)
Тμω – малая постоянная времени контура скорости, равная:
![]() (с)
(15)
(с)
(15)
Тогда передаточная функция регулятора скорости принимает вид:
 (16)
(16)
Далее необходимо выбрать соответствующие полученным передаточным функциям параметры регуляторов.
3.3. Получение передаточных функций регуляторов.
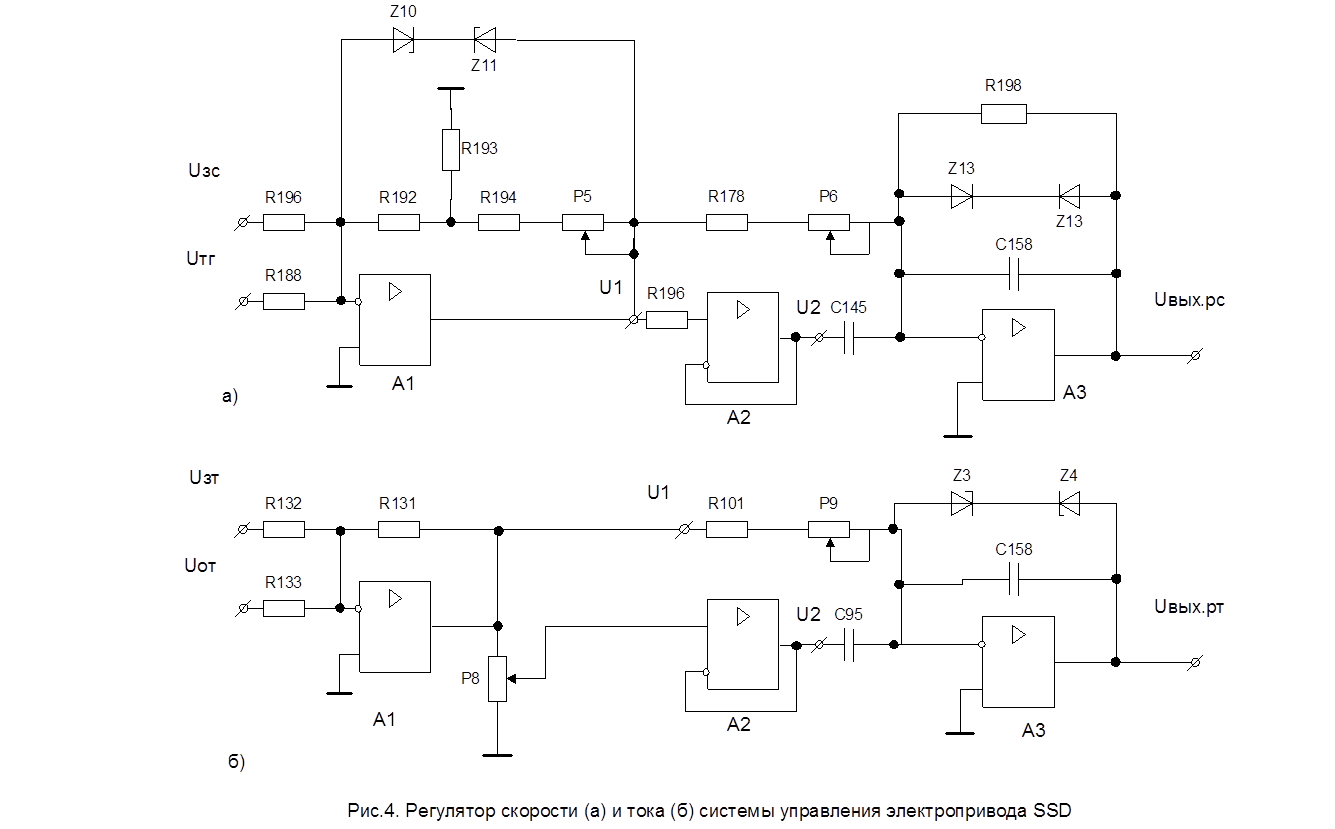
Принципиальная схема системы регулирования электропривода SSD, включающая в себя регуляторы скорости вращения и тока, показана на рис. 3.
Расчётные схему регуляторов тока и скорости привода SSD показаны на рисунке 4.
111
Передаточную функцию безинерционного звена регулятора скорости, выполненного на операционном усилителе А1 получим с помощью его расчётной схемы, показанной на рисунке 5.
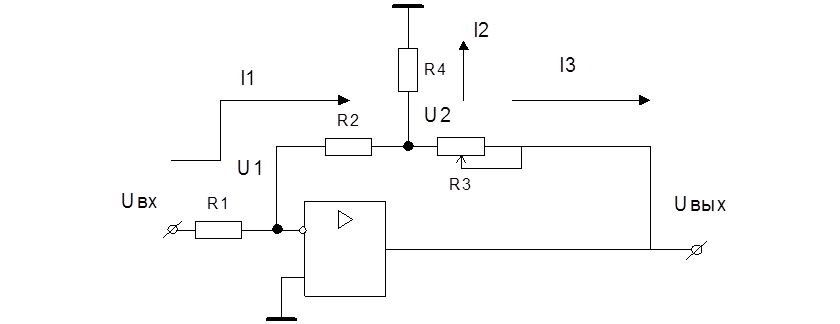
Рис. 5. Расчётная схема безинерционного звена регулятора скорости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.