6. Синтез и анализ системы автоматического управления.
6.1. Синтез системы автоматического управления.
Обеспечение высокого качества статических и динамических характеристик электропривода требует создания устройств управления , построенных с учетом свойств системы "преобразователь частоты - машина переменного тока" как сложного взаимосвязанного объекта регулирования . АД является многоканальным объектом регулирования с большим количеством нелинейных перекрестных связей между каналами . При синтезе производится компенсация нелинейностей объекта и нейтрализация внутренних связей, что позволяет применять к преобразованной структуре методы подчиненного регулирования, хорошо зарекомендовавшие себя в электроприводе постоянного тока.
В настоящее время разработаны сравнительно простые и удобные методы оптимизации переходных процессов для таких координат привода, которые постоянны в установившемся режиме. В этом отношении системы координат a,b и d,q не могут быть использованы, т.к. в установившемся режиме частоты регулируемых координат отличны от нуля. И лишь система координат Х,У отвечает указанному требованию.
Дополнительные преимущества с точки зрения простоты представления объекта и синтеза регуляторов получаются при рациональном выборе угловой скорости и ориентации координатных осей в переходном режиме. Поскольку результирующие пространственные векторы токов, напряжений и потокосцеплений статора и ротора в установившемся режиме взаимно неподвижны, если питающее напряжение синусоидально, любая система координат, привязанная к одному из этих векторов, пригодна для оптимизации.
В данной работе синтез проводится по системе ориентированной по направлению результирующего вектора потокосцепления ротора y2. Наиболее просто это реализуется, если осуществить питание статорных обмоток от тиристорного преобразователя частоты на базе автономного инвертора тока.
В этом случае уравнения асинхронного двигателя при ориентации системы координат по направлению результирующего вектора потокосцепления ротора yr имеет вид представленный в разделе 6.2 .
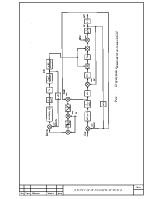
6.2. Математическая модель и структурная схема АД
с частотно-токовым управлением
В синхронно вращающейся системе координат ХОУ уравнения двухполюсного трёхфазного симметричного асинхронного электродвигателя с роторными обмотками , приведёнными к статорным , следуя [ 9 , с.37 ] , в обобщённых про -странственных векторах переменных величин можно пред -ставить в следующем виде
Us = Rs*Is + dYs / dt + j*w1*Ys,
0 = Rr’*Ir + dYr / dt + j*( w1 – w )* Yr,
M = J*dw / dt + Mc(t), (6.2.1.)
M = 3/2*Xm/Xr*[ Is*Ys ],
Ys = Xs/w1n*Is + Xm/w1n*Ir,
Yr = Xm/w1n*Is + Xr/w1n*Ir, где Us , Is – векторы напряжения и тока фазных обмоток статора;
Ys , Yr – векторы потокосцепления статора и ротора;
w1n , w1 – номинальная и текущая частоты вращения поля;
w – частота вращения ротора;
М – электромагнитный момент АД;
J – суммарный момент инерции ротора и нагрузки;
Мс(t) – момент сопротивления нагрузки;
Xs , Xr’ – полные индуктивные сопротивления статорной обмотки и обмотки ротора, приведённой к статору;
Rs , Rr’ – активные сопротивления обмотки статора и обмотки ротора , приведённой к статору .
В случае электропитания АД от источника тока первое и пятое уравнения становятся тождествами и система уравнений ( 6.2.1. ) примет вид
0 = Rr’*Ir + dYr / dt + j*( w1 – w)*Yr ,
3/2*Kr*[ Is*Ys] = J*dw / dt + Mc(t) , ( 6.2.2.)
Yr = Xm/w1n*Is + Xr’/w1n*Ir ,
где Kr = Lm / Lr – коэффициент ротора .
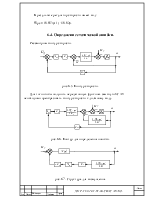
Если теперь связать систему отсчёта с пространст - венным вектором Yr , то есть так расположить пространственные оси координат , чтобы Yr лежал на оси ОХ , то система уравнений ( 6.2.2.) в проекциях переменных по осям ОХ и ОУ запишутся следующим образом
![]() Rr’*irx + dYrx
/ dt = 0 ,
Rr’*irx + dYrx
/ dt = 0 ,
Rr*iry + ( w1 – w )*Yrx = 0 ,
J*dw / dt + Mc(t) = 3/2*Kr*isy*Yrx , ( 6.2.3.)
Xm/w1n*isx + Xr/w1n*irx = Yrx ,
Xm/w1n*isy + Xr/w1n*iry = 0 ,
Исключая в уравнениях ( 6.2.3.) составляющие irx и iry получим
![]() Tr*dYrx / dt + Yrx = Xm/w1n*isx ,
Tr*dYrx / dt + Yrx = Xm/w1n*isx ,
isy = 1/ ( Kr*Rr )*( w1 – w )*Yrx , ( 6.2.4.)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.