Задание.
Вид рабочей машины: шахтный подъемник.
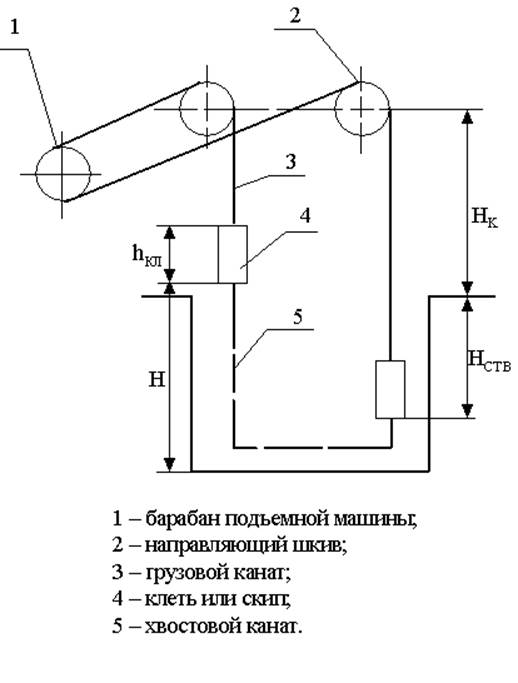
Рис. 1. Шахтный подъемник
Параметры:
Вес скипа ![]() = 87 кН;
= 87 кН;
Грузоподъемность ![]() =120 кН;
=120 кН;
Скорость подъема ![]() =7 м/c;
=7 м/c;
Диаметр барабана
подъемной машины ![]() =4 м;
=4 м;
КПД барабана ![]() =0,95;
=0,95;
Передаточное число
редуктора ![]() =11,5;
=11,5;
Вес 1
метра каната ![]() =153 Н;
=153 Н;
Жесткость 1
метра каната ![]() Н/м;
Н/м;
Глубина ствола ![]() =170 м;
=170 м;
Высота копра ![]() =36 м;
=36 м;
Высота скипа ![]() =3,5 м;
=3,5 м;
Высота подъема ![]() =180 м;
=180 м;
Момент инерции
барабана ![]() кг∙м²;
кг∙м²;
Момент инерции
двигателя ![]() =200 кг∙м².
=200 кг∙м².
1. Расчет параметров механической части привода.
Определим длину окружности барабана подъемной машины
![]() (1)
(1)
Зная скорость подъема (![]() ) определим количество
оборотов барабана в минуту необходимых для поддержания заданной скорости
) определим количество
оборотов барабана в минуту необходимых для поддержания заданной скорости
 (2)
(2)
Определим скорость вращения быстроходного вала редуктора, а значит и скорость вращения вала двигателя
![]() (3)
(3)
Угловая скорость вращения вала двигателя
 (4)
(4)
Радиус приведения
 (5)
(5)
Приведенный момент инерции создаваемый канатом
![]() ,
(6)
,
(6)
где ![]() - длина каната;
- длина каната;
 - масса 1
метра каната.
- масса 1
метра каната.
Приведенный момент инерции создаваемый клетью
![]() ,
(7)
,
(7)
где  - масса клети.
- масса клети.
Тогда приведенный момент инерции первой массы
 (8)
(8)
Приведенный момент инерции создаваемый грузом
![]() ,
(9)
,
(9)
где  - масса груза.
- масса груза.
Тогда приведенный момент инерции второй массы
![]() (10)
(10)
Жесткость механической связи
 ;
(11)
;
(11)
Приведенный момент на валу барабана
 ;
(12)
;
(12)
Потери в барабане
 ;
(13)
;
(13)
Потери в редукторе
 (14)
(14)
Приведенный статический момент
 (15)
(15)
Момент инерции механической части
![]() ;
(16)
;
(16)
Коэффициент соотношения масс
 ;
(17)
;
(17)
Собственная частота колебаний кинематической цепи (резонансная частота механической части)
 ;
(18)
;
(18)
2. Силовая схема ЭП системы «ТП-Д».
Силовая схема ЭП системы «ТП-Д» приведена на рис. 2.
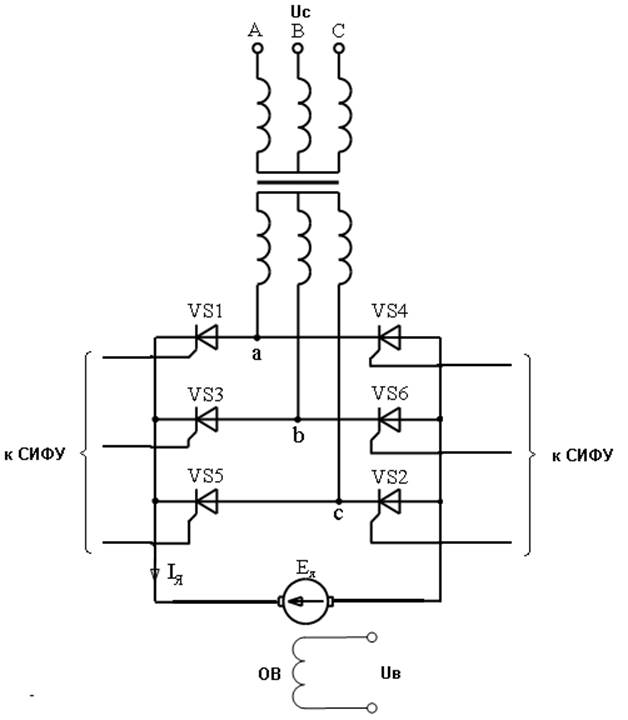
Рис.2. Силовая схема системы «ТП-Д».
3. Выбор электродвигателя и расчет его параметров.
Т.к. ни один двигатель по моменту не подходит, то выбираем два двигателя 4П-450-36-630-УЗ. Основные параметры двигателя приведены в таблице.
Таблица 1.
Параметры двигателя 4П-450-36-630-УЗ
|
|
|
|
|
|
|
630 |
600 |
400 |
1000 |
91,7 |
Угловая скорость будет равна
 (19)
(19)
Рассчитаем номинальный ток
 (20)
(20)
Сопротивления якорной обмотки
 (21)
(21)
Произведение конструктивной постоянной и магнитного потока
 (22)
(22)
Номинальный момент
![]() .
(23)
.
(23)
4. Выбор трансформатора. Расчет параметров якорной
цепи двигателя
Т.к. двигатели будут питаться от одного преобразователя (будут соединены параллельно), то необходимо выбирать трансформатор мощностью равной или больше мощности двух выбранных двигателей.
Трансформатор ТСЗП-2500/10УЗ (исполнение 2):
Вентильная обмотка:
![]()
![]()
Преобразователь:
![]()
![]()
Потери:
ХХ: 4800 Вт;
КЗ: 14000 Вт;
Напряжение КЗ: 5,2%;
Ток ХХ: 1%;
Сопротивление 2-х двигателей соединенных параллельно:
 ; (24)
; (24)
Ток:
![]() ; (25)
; (25)
Номинальный момент создаваемый двумя двигателями:
![]() ; (26)
; (26)
Момент инерции:
![]() (27)
(27)
Статический момент, приходящийся на один двигатель:
 ; (28)
; (28)
Ток нагрузки:
 ; (29)
; (29)
 ; (30)
; (30)
Параметры вентильной обмотки трансформатора:
 ; (31)
; (31)
 ; (32)
; (32)
![]() ; (33)
; (33)
 ; (34)
; (34)
Коммутационное сопротивление преобразователя:
 ; (35)
; (35)
Параметры якорной цепи с учетом преобразователя:
 (36)
(36)
 ; (37)
; (37)
![]() ; (38)
; (38)
Постоянные времени:
-электромагнитная:
 ; (39)
; (39)
-электромеханическая:
 ; (40)
; (40)
5. Расчет электромеханических и механических
характеристик системы «ТП-Д» для разомкнутой системы.
Скорость идеального ХХ:
 ; (41)
; (41)
![]()
Скорость при работе под нагрузкой:
 ; (42)
; (42)
Падение скорости
при изменении нагрузки от 0 до ![]() :
:
![]() ; (43)
; (43)
![]()
Минимальная скорость при регулировании:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.