





















В настоящее время при высоких темпах электрификации более 60% всей электрической энергии вырабатываемой в мире потребляется электрическим приводом.
Среди обширного числа электрических приводов различают автоматизированный и неавтоматизированный электрические привода.
Сегодня автоматизированный электрический привод является основой механизации и комплексной автоматизации производственных процессов.
Автоматизированный электропривод состоит из электродвигателя, силового преобразовательного устройства и системы управления.
Наиболее распространенной из систем управления электроприводами является релейно-контакторная система управления.
В данном курсовом проекте требуется сконструировать релейно-контакторную схему управления и защиты, посредством которой будет производиться автоматизация пуска, реверса и торможения ДПТ в функции тока.
Рис.1 Нагрузочная диаграмма механизма.
Режим работы электродвигателя определяем в зависимости от фактического значения продолжительности включения в процентном отношении:
, 
где  – время работы
электродвигателя;
– время работы
электродвигателя;
![]() –
время паузы.
–
время паузы.
Численное значение ![]() находится в
пределах 8-80%, имеет место повторно-кратковремменый режим (S3).
находится в
пределах 8-80%, имеет место повторно-кратковремменый режим (S3).
Выбор двигателя производим по методу эквивалентной мощности (момента). Если двигатель имеет жесткую характеристику (n=const), то мощность пропорциональна моменту
![]()



![]()
![]()
Так как ![]() отличается от
отличается от ![]() , то мощность электродвигателя необходимо
выбирать по ближайшему стандартному значению, пересчитывая ее по формуле:
, то мощность электродвигателя необходимо
выбирать по ближайшему стандартному значению, пересчитывая ее по формуле:
Двигатель выбираем из условия .
К тому условию подходит двигатель Д814. Для этой серии двигателей характерна кратность пусковых и максимальных моментов по отношению к номинальному 3 и 2,7 соответственно.
Данные двигателя указаны в таблице:
|
P2H |
IH |
nH |
Mmax |
RB |
IBH |
ФН×10-2 |
RЯ |
RДП |
JЯ |
nmax |
m |
|
кВт |
А |
об/мин |
Н×м |
Ом |
А |
Вб |
Ом |
Ом |
кг×м2 |
об/мин |
кг |
|
110 |
550 |
490 |
4720 |
34,0 |
4,4 |
7,52 |
0,0079 |
0,005 |
10,25 |
1700 |
2240 |
Произведем предварительные расчеты:




точка О
![]()
точка А
![]()
![]()
![]()
Зададим масштаб m:
 , где
, где
![]()
Расчет пусковых и тормозных сопротивлений:
![]()
![]()
![]()
4.1 Выбор силовой схемы
Так как у нас ДПТ с номинальным напряжением 220 В, то выбираем трёхфазный источник напряжения 220 В. Нужно предусмотреть центральное включение (отключения) всей схемы от источника питания. Эту роль выполняет автоматический выключатель, который является также защитой схемы от токов превышающих допустимые. После автоматического выключателя подаём напряжение через диодный мост на двигатель через две группы контактов, которые осуществляют подключение электродвигателя к напряжению с прямой полярностью контактов обмотки якоря и к напряжению с обратной полярностью контактов обмотки якоря.
Для разгона двигателя по двум ступеням в цепь якорной обмотки ДПТ вводят сопротивления R1, R2 и R3. В первоначальный момент, когда скорость двигателя была равной нулю, двигатель начинает разгон при двух подключённых сопротивлениях. Как только скорость двигателя дойдёт до скорости, когда можно включать вторую ступень, контактами необходимо шунтировать сопротивление R1. После чего двигатель разгоняется, используя одно сопротивление в цепи ротора R2,и потом R3. Как только двигатель достаточно разгонится, нужно произвести шунтирование всех сопротивлений. Тем самым, двигатель выходит на естественную характеристику работы.
При торможении противовключением в цепи якорной обмотки ДПТ возникают большие токи, которые мы должны любым образом снизить. Так же как мы разгоняли двигатель, путём отключения сопротивлений, мы будем его останавливать, путём добавления сопротивления в цепь якорной обмотки ДПТ. Два сопротивления у нас есть R1 и R2. Необходимо только отключить контакты шунтирующие их. А также нужно дополнительное тормозное сопротивление Rт. Итак, торможение осуществляется при использовании четырёх сопротивлений R1, R2,R3 и Rт, включённых последовательно.
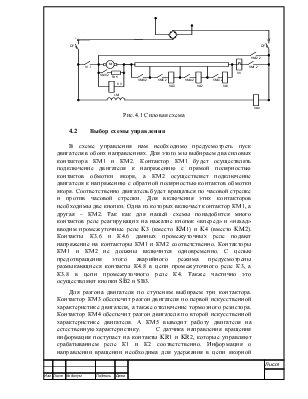
 Рис.4.1
Силовая схема
Рис.4.1
Силовая схема
4.2 Выбор схемы управления
В схеме управления нам необходимо предусмотреть пуск двигателя в обоих направлениях. Для этого мы выбираем два силовых контактора КМ1 и КМ2. Контактор КМ1 будет осуществлять подключение двигателя к напряжению
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.