МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ ИМЕНИ П.О.СУХОГО
Факультет автоматизированных и информационных систем
Кафедра «Автоматизированный электропривод»
Лабораторная работа № 3
по РКСУ и защиты ЭП
«Автоматизация пуска и торможения двигателя постоянного тока параллельного возбуждения в функции времени»
Исполнитель: студент гр. ЭП-31
Руководитель:
Гомель, 2006
Автоматизация пуска и торможения двигателя постоянного тока параллельного возбуждения в функции времени.
Цель работы: изучить релейно-контакторную схему пуска и торможения ДПТ параллельного возбуждения в функции времени; изучить методику расчета пусковых и тормозных сопротивлений, времени пуска и торможения ДПТ.
Порядок выполнения работы.
Выписываем паспортные данные исследуемого двигателя:
Частота питающей сети 50 Гц.
Номинальная мощность Pн =90 Вт.
Uн = 220 В
Iн = 0,76 А
J = 0,003 кг/м2 – момент инерции якоря. JДВ = 4·J = 0,012 кг/м2
Номинальная частота вращения nн =1500 об./мин.
![]()
![]()
Расчёт пусковых и тормозных сопротивлений графоаналитическим методом
Находим номинальный момент:

Рассчитаем сопротивление якоря:
 Ом;
Ом;
Частота вращения холостого хода:

Для построения диаграммы разгона двигателя по ступеням необходимо найти частоту вращения и момент в опорных точках графика:
n = 1900 об/мин М = 0
nН = 1500 об/мин М = 0,57 Н·м
![]()
Момент перехода на следующую
ступень:
![]()
Графики искусственных, естественной характеристик и характеристика динамического торможения ДПТ:
Рассчитаем номинальное сопротивление якоря:
 Ом.
Ом.
Выбрав масштаб по сопротивлению и рассчитав пусковые сопротивления получим следующие их численные значения:
R1 = 87 Ом;
R2 = 58 Ом.
Тормозное сопротивление примем: RТ = 2·(R1+R2) = 290 Ом.
Последовательность работы аппаратов и устройств.
|
Состояние схемы |
Аппараты или устройства |
||||||||||||
|
Контактор КМ1 |
Контактор КМ2 |
Конт. КМ3 |
Конт. КМ4 |
Реле времени |
Реле напряж. |
Токовое реле |
|||||||
|
КМ1.1 |
КМ1.2 |
КМ1.3 |
КМ1.4 |
КМ1.5 |
КМ2.1 |
КМ2.2 |
КМ3 |
КМ4 |
КТ1 |
КТ2 |
KV1 |
KA1 |
|
|
Исход. положение |
- |
- |
- |
- |
+ |
- |
- |
- |
- |
- |
- |
+ |
+ |
|
Пуск “вперед” и ускорение но первой ступени |
+ |
+ |
+ |
+ |
- |
+ |
+ |
- |
- |
+ |
- |
+ |
+ |
|
На второй ступени |
+ |
+ |
+ |
+ |
- |
+ |
+ |
+ |
- |
+ |
+ |
+ |
+ |
|
Окончание ускорения |
+ |
+ |
+ |
+ |
- |
+ |
+ |
+ |
- |
+ |
+ |
+ |
+ |
|
Торможение до 0 |
- |
- |
- |
- |
+ |
- |
- |
- |
+ |
- |
- |
+ |
+ |
Для выполнения работы рассчитаем выдержки времени:
Момент на валу Мст примем равным номинальному:
МСТ = МНОМ = 0,57 Н·м;
Исходя из кратности максимального момента, учитывая что ток пропорционален моменту, получим что относительное значение тока I1 будет равно:
I01 = 2,2
Сопротивление RДВ = RН = 289,5 Ом;
Тогда относительное сопротивление будет равно:
R0 = 1;
Тогда относительное значение тока I2
Найдем среднее значение относительного тока:
I0СР = 0,5·( I01 + I02 ) = 0,5·(2,2 + 3,28) = 2,74
Учитывая пропорциональность между током и моментом найдем среднее значение момента:
МСР = 2,65·МН = 2,74·0,57 = 1,56 Н·м;
Теперь по формуле найдем время разгона по первой и второй искусственным характеристикам:
 с,
с,
 с.
с.
Схема проведения опыта
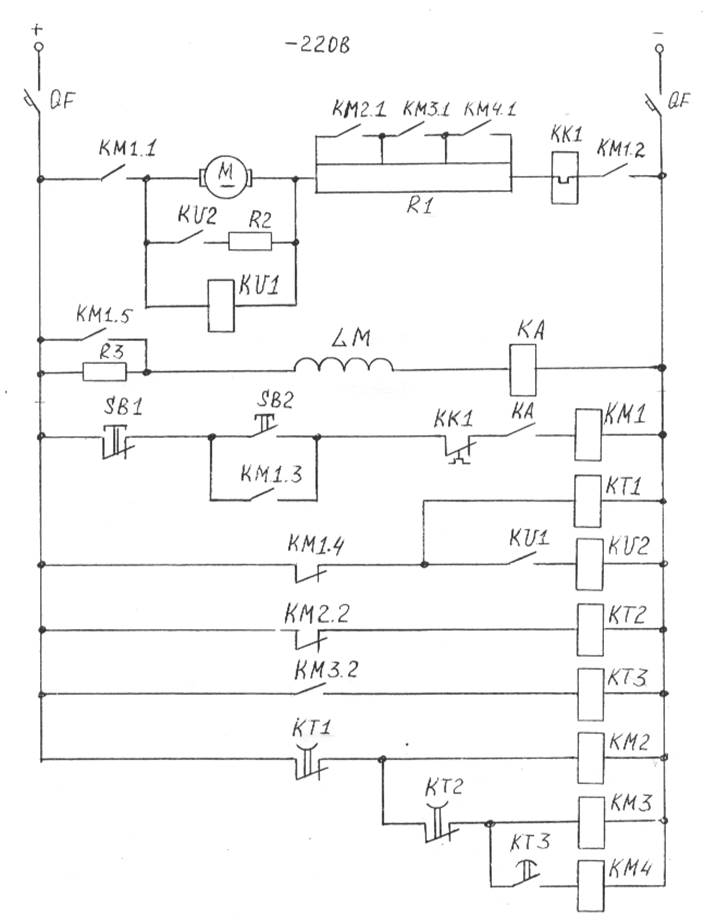
Рис.6.1. Релейно-контакторная схема управления ДПТ параллельного возбуждения в функции времени.
Вывод: изучил релейно-контакторную схему управления пуском ДПТ в функции времени; построил искусственные и естественную механические характеристики и тормозную характеристику при динамическом торможении. Экспериментально определил последовательность работы аппаратов и устройств.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.