
Цель работы: исследовать качество процессов управления объектами при изменении длительности такта квантования.
3.1. Длительность такта квантования во многом определяет качество регулирования. При уменьшении такта квантования дискретный ПИД- регулятор приближается по качеству регулирования к аналоговому ПИД-регулятору, полностью используя возможности аналогового регулирования. Дискретный АР- регулятор с уменьшением такта квантования во столько же раз уменьшает время регулирования. Но с другой стороны с уменьшением такта квантования увеличивается начальное значение управляющей переменной u(0), что требует увеличения мощности регулятора или, другими словами, приводит к увеличению затрат на регулирование. Поэтому вводят ограничение на максимумы управляющих воздействий в системах регулирования.
В ПИД-регуляторе начальное значение управляющей переменной u(0) зависит от коэффициента передачи К и коэффициента дифференцирования СД, поэтому с увеличением этих составляющих в алгоритме управления дополнительно приводит к увеличению значения u(0).
u(0) = q0 = K(1 + _СД)
При синтезе ПИД-регулятора при прочих равных условиях можно ограничить значение u(0) за счет увеличения следующего значения u(1). Для этого надо для конкретных условий регулирования определить максимальное именение сигнала задания w0 (или ошибки e(k)) и после этого положить q0 = u(0)/w0. А для того, чтобы значение u(1) управляющей переменной было меньше u(0), параметр q1 регулятора выбирается с учетом неравенства:
q1 £ -q0(1- q0b1)
В апериодическом регуляторе АР начальное значение управляющей переменной u(0) обратно пропорционально сумме коэффициентов полинома B(z) в числителе передаточной функции объекта управления:
![]()
Значение суммы этих коэффициентов уменьшается с уменьшением такта квантования. Это связано с особенностью дискретных передаточных функций. Следовательно, с уменьшением такта квантования начальное значение u(0) увеличивается. Таким образом, задавая ограниченное значение управляющей переменной u(0) можно определить такт квантования.
Можно ограничить значение u(0) другим способом - применяя АР+1-регулятор. В этом регуляторе время регулирования увеличено на один такт m+1 по сравнению с АР-регулятором. За счет этого стало возможным заменить один такт с большим управляющим воздействием u(0) на два такта с уменьшенными воздействиями u(0)= u(1). Значение u(0) в этом случае уменьшается в (1-a1) раз. С учетом этого для АР+1-регулятора такт квантования можно выбирать меньшим, чем для АР-регулятора.
Экспериментально установлены следующие оптимальные значения тактов квантования:
для АР- регулятора - T0/TS³0.36 или T0/T95³0.18
для АР+1- регулятора - T0/ST³0.22 или T0/T95³0.11
где TS- сумма постоянных времени объекта управления;
T95- время достижения выходным сигналом значения 95% от установившегося значения.
В дискретных системах управления предпочтительнее большие такты квантования, что экономит ресурсы ЭВМ и позволяет догружать ее другими задачами.
ПИД-регулятор с увеличением такта квантования становится дискретным, приобретая новые свойства. Для ПИД-регулятора есть некоторое оптимальное увеличение такта, экономящее ресурсы ЭВМ и улучшающее регулирование. Дальнейшее увеличение такта ухудшает регулирование. Например для колебательных объектов, увеличенный такт может совпасть с периодом автоколебаний
3.2. Изучите теоретические сведения, запишите определения и расчетные формулы, определяющие ограниченное значение управляющей переменной.
3.3. Запустите программу моделирования, выберите заданный объект регулирования, запишите его описание, передаточную функцию G(s) и заданное ограничение по управлению.
3.4. Задайте время моделирования TУЧТ примерно в 6...8 раз больше суммы постоянных времени объекта. Это время должно быть минимальным и одинаковым для всех графиков и таблиц в данной работе.
3.5. Запомните график и таблицу переходной характеристики.
3.7. Настройте по заданному критерию оптимальные процессы регулирования с ПИД-регулятором с учетом ограничения по u(0):
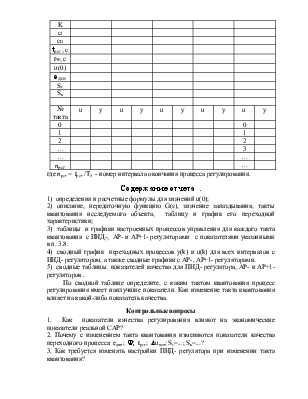
-3 при минимально возможном, максимально возможном и среднем такте квантования (время регулирования должно быть не более половины времени установления переходной характеристики);
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.