


















Учреждение образования
«Гомельский государственный технический университет имени П. О. Сухого»
Кафедра «Автоматизированный электропривод»
СИСТЕМА УПРАВЛЕНИЯ
ТИРИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ
ЦЕПИ ЯКОРЯ КОМПЛЕКТНОГО
ТИРИСТОРНОГО ЭЛЕКТРОПРИВОДА КТЭ
ЛАБОРАТОРНЫЙ ПРАКТИКУМпо дисциплине «Наладка и диагностика автоматизированного электропривода» для студентов специальности 1-53 01 05
«Автоматизированные электроприводы» дневной и заочной форм обучения
В составе реверсивного тиристорного электропривода используются тиристорные преобразователи (ТП) как с совместным, так и с раздельным управлением комплектами тиристоров. К настоящему моменту основным стал способ раздельного управления. Совместное управление применяется только для специальных приводов, например, при работе в области малых токов и при частых изменениях направления тока [2].
В настоящее время электроприводы постоянного тока с раздельным управлением получили широкое распространение в металлургии, текстильной и бумажной промышленности и в ряде других.
Примером таких электроприводов может служить комплектный тиристорный электропривод КТЭ. Он предназначен для управления электродвигателями постоянного тока мощностью до 1000 кВт, регулирования их параметров: напряжения (ЭДС), тока якоря, возбуждения, частоты вращения и положения вала. В аппаратуре управления, защиты и регулирования преобразователя КТЭ применяются современные электронные изделия: специализированные гибридные интегральные микросхемы, логические устройства на основе КМОПтехнологии и т. п.
Хотя наладка систем управления большинства электроприводов постоянного тока подразумевает выполнение ряда стандартных операций, для того чтобы четко представлять последствия действий, выполняемых в ходе наладочных работ, необходимо, прежде всего, подробно ознакомиться с устройством, принципом действия и рекомендациями по эксплуатации конкретного электропривода.
Настоящий лабораторный практикум рассматривает устройство, принцип действия и методику проведения наладочных работ в системе управления ТП электроприводов серий КТЭ. При работе с данным изданием рекомендуется пользоваться набором оригинальных принципиальных схем, прилагаемым к техническому описанию и инструкции по эксплуатации рассматриваемого электропривода.
1. Подробное изучение устройства и принципа действия системы управления тиристорным преобразователем цепи якоря комплектного тиристорного электропривода КТЭ.
2. Изучение типовой методики проведения работ по наладке систем управления комплектных тиристорных электроприводов постоянного тока.
1. К выполнению практической части лабораторной работы допускаются студенты, прошедшие специальный технический инструктаж и изучившие техническое описание и инструкцию по эксплуатации.
2. Электродвигатель, блок управления, сглаживающий и сетевой реакторы, трансформатор, а также контрольно-измерительная аппаратура должны быть заземлены.
3. Категорически запрещается вставлять и вынимать ячейки кассеты управления под напряжением. Любые действия, связанные с внесением схемных изменений, должны производиться только после отключения электропривода от питающей сети.
4. Приступать к выполнению практической части лабораторной работы студенты могут только с разрешения преподавателя.
3. ТЕХНИЧЕСКОЕ ОПИСАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ТИРИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЦЕПИ ЯКОРЯ
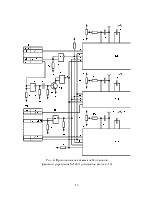
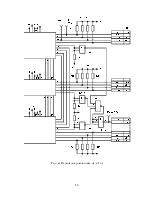
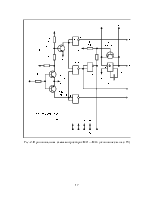
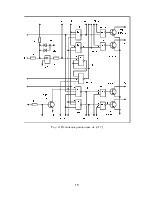
Система управления предназначена для раздельного управления двухмостовым ТП реверсивного комплектного электропривода и представляет собой электронное устройство, обеспечивающее регулирование выходного напряжения ТП путем изменения углов включения вентилей в функции входного напряжения управления, поступающего из системы регулирования. Система управления имеет следующие технические характеристики:
– диапазон изменения управляющего сигнала +10…–10 В;
– диапазон изменения угла управления не менее 170 эл. град;
– асимметрия управляющих импульсов не более ±3 эл. град;
– дрейф регулировочной характеристики при изменении температуры окружающей среды от 1 до 40 °С не более ±4 эл. град;
– зависимость угла регулирования от напряжения управления линейная;
– жесткость ограничивающей характеристики не более
0,5 эл. град/В;
– диапазон регулирования минимального угла 5…90 эл. град;
– диапазон регулирования максимального угла 90…175 эл. град;
– диапазон регулирования начального угла согласования
60…130 эл. град;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.