Белорусский национальный технический университет
Кафедра ”Теории машин, механизмов и манипуляторов“
Проектирование и исследование динамически нагруженного машинного агрегата
Станок для отрезания заготовок
КУРСОВОЙ ПРОЕКТ
(пояснительная записка)
Проект № 7
Вариант №5
Разработал: студент группы
Руководитель:
Минск 2008 г
1. Описание работы машины и исходные данные для проекта
СТАНОК ДЛЯ ОТРЕЗАНИЯ ЗАГОТОВОК
Станок предназначен для отрезания заготовок от пруткового материала. Движение от электродвигателя через зубчатый редуктор передается кривошипу 1 (рис.1) кривошипно-ползунного механизма, которые осуществляет возвратно-поступательное перемещение ползуна 3 с установленным на нем ножом .Рабочий ход происходит при движении ползуна снизу вверх.
Подача прутка в зону резания осуществляется с помощью кулачкового механизма через систему рычагов.
Исходные данные: Н – вход ползуна;
![]() ; θp max – максимальный
угол давления между шатуном 2 и ползуном 3 на рабочем ходу;
; θp max – максимальный
угол давления между шатуном 2 и ползуном 3 на рабочем ходу; ![]() – частота вращения кривошипа; Fрез –
максимальная сила резания;
– частота вращения кривошипа; Fрез –
максимальная сила резания; ![]() – угловой ход
коромысла кулачкового механизма;
– угловой ход
коромысла кулачкового механизма;![]() -длина коромысла;
-длина коромысла;
![]() – фазовые углы поворота кулачка,
– фазовые углы поворота кулачка,
Для всех вариантов:
1.
![]()
2. Массы
звеньев: ![]() , где q=80 кг/м;
, где q=80 кг/м; ![]() ;
; ![]() .
.
3. Моменты
инерции звеньев: ![]() = 0.1 кг∙м2;
= 0.1 кг∙м2; ![]() = 0.17
= 0.17 ![]() .
.
Момент
инерции ротора двигателя и всех зубчатых колес, приведенный к валу двигателя, ![]() =0.05 кг∙м2.
=0.05 кг∙м2.
4. Частота
вращения вала двигателя ![]() = 950 об/мин.
= 950 об/мин.
5. Коэффициент
неравномерности движения ![]() =0.08.
=0.08.
6. Максимально
допустимый угол давления в кулачковом механизме ![]() = 40 °.
= 40 °.
7. Законы движения толкателя: при удалении - № 3(симметричный); при возвращении - №6.
Таблица 1. Исходные данные
|
Вар. |
H, м |
λ |
θp max |
n1,об/мин |
Fрез,кН |
|
|
|
|
5 |
0.28 |
0.303 |
10.1 |
130 |
9.5 |
25 |
0.12 |
70 |
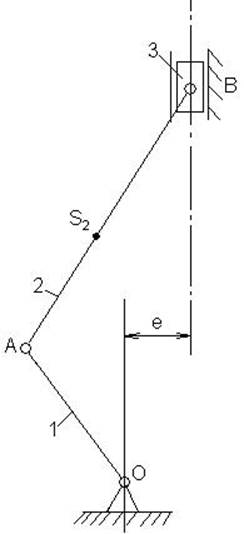
Рис. 1
2. Динамический синтез и анализ машины в установившемся режиме движения
2.1 Задачи динамического синтеза и анализа машин
Динамический синтез машины по коэффициенту неравномерности движения δ состоит в определении такой величины постоянной составляющей приведенного момента инерции I Iп, при которой колебания скорости звена приведения не выходит за пределы, устанавливаемые этим коэффициентом. Обычно это достигается установкой дополнительной вращающейся массы выполняемой в виде маховика.
Динамический анализ машины состоит в определении закона движения звена приведения ω1(φ1) и ε1(φ1) при полученном значении I Iп.
Блок-схема исследования динамической нагруженности машины показана на рисунке 2.
Рис. 2
2.2 Определение размеров, масс и моментов инерции звеньев рычажного механизма.
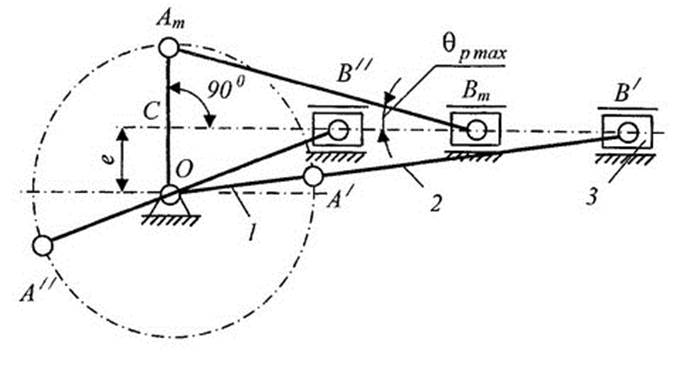 |
Рис. 3
Из
ΔAmBmC выражаем sinθp max = ![]() ,откуда находим отношение
,откуда находим отношение  :
:
![]() = 1-
= 1-  =1-
=1-  = 0.422
= 0.422
Из
Δ![]() и Δ
и Δ![]() выражаем:
выражаем:
![]()
Откуда,
учитывая, что ![]() и e = εl1 ,
находим:
и e = εl1 ,
находим:

 =
=
= =0,138
=0,138
Тогда
 м
м
![]() м
м
Координата центра
масс шатуна ![]()
![]() м.
м.
![]()
![]() м
м
![]() м
м
![]() м
м
![]() м
м
Массы звеньев:
![]() ,
,
![]() ,
,
![]()
где ![]() .
.
Силы тяжести звеньев:
![]() ,
,
![]() ,
,
![]()
Моменты инерции шатуна:
![]() ,
,
![]()
Приведённый момент инерции вращающихся звеньев (без маховика):

Средняя угловая скорость кривошипа 1:

Определяем обобщенную координату механизма φ0 в крайнем, наиболее удалённом положении ползуна 3(рисунок 4).
 ,
,
![]()
Результаты определения размеров и параметров механизма сведены в табл. 2.1
Таблица 2.1
|
|
Размеры, м |
Массы, кг |
Моменты
инерции, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.3 Структурный анализ рычажного механизма
Схема механизма
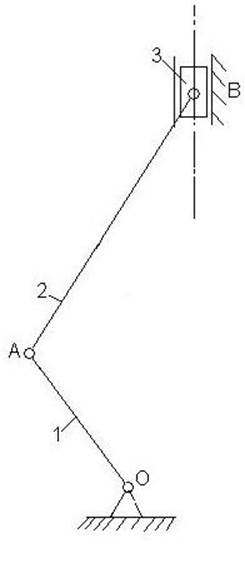
Рис. 4
Число подвижных звеньев n=3
Число низших кинематических пар pn=4
в том числе:
вращательные - O(1, 0), A(1, 2), B(2, 3);
поступательные - B(3, 0).
Число степеней свободы механизма:
W=3∙n-2∙pn─ pB=3∙3─ 2∙4─ 0=1
Начальное звено – кривошип 1.
Строение механизма:
Механизм 1-го класса Структурная группа 2-го класса
2-го порядка
2-го вида
Рис. 5
Формула образования механизма:
I(1,0)→II(2,3), механизм 2-го класса
2.4. Построение планов положений
Выбирается масштабный коэффициент построения ![]() м/мм.
м/мм.
Чертежные отрезки
![]()
 мм,
мм,
 мм,
мм,
 мм.
мм.
 мм.
мм.
Так как механизм второго класса то планы положений строятся геометрическим методом засечек, взяв за начало отсчета дальнее крайнее положение, которое обозначается первым. 12 положений механизма нумеруются в сторону вращения кривошипа.
Расчетное положение механизма №11 выделяется. Показывается траектория движения точки S2 шатуна. Замеряем для расчетного положения координаты и рассчитываем графически координаты точек и звеньев (поз.1, Лист.1)
2.5. Определение аналогов скоростей
Так как закон изменения действительной угловой
скорости ![]() внутри
цикла неизвестен,
то вместо скоростей определяют аналоги скоростей, т.е. производные от линейных
координат по обобщенной координате – углу поворота кривошипа
внутри
цикла неизвестен,
то вместо скоростей определяют аналоги скоростей, т.е. производные от линейных
координат по обобщенной координате – углу поворота кривошипа ![]()
 .
.
План аналогов скоростей - это векторный
многоугольник, отрезки которого изображают в масштабе линейные аналоги
скоростей точек ![]() .
.
Построение начинаем от входного звена 1, у которого аналог линейной скорости вращающейся точки A равен
 м.
м.
Принимаем масштабный коэффициент плана аналогов ![]() м/мм.
м/мм.
Тогда отрезки будут равны
 мм.
мм.
Так как вектор аналога скорости при вращательном
движении ![]() ,
то из выбранного полюса
,
то из выбранного полюса ![]() проводим
отрезок
проводим
отрезок ![]() в
сторону
в
сторону![]() (поз.2,
лист 1).
(поз.2,
лист 1).
Аналог скорости точки B поршня 3 строим графически по векторным уравнениям
 , где
, где
![]() ,
,
![]() ,
,
![]() .
.
Точку S2
шатуна строим на отрезке ![]() плана
по свойству подобия, отложив отрезок
плана
по свойству подобия, отложив отрезок
 мм.
мм.
Замеряем отрезки планов аналогов as2, ab, ps2, pb и рассчитываем аналоги
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.





