ПОНЯТИЕ АЛГОРИТМА.
БЛОК-СХЕМА АЛГОРИТМА
Алгоритм – точное предписание, определяющее содержание и порядок действий, которые необходимо выполнить над исходными и промежуточными данными для получения конечного результата при решении задач определённого типа.
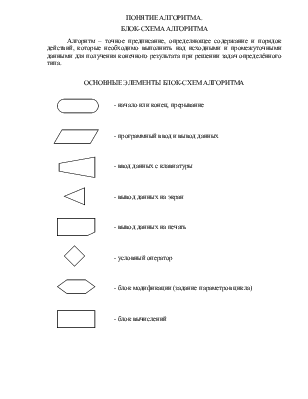
ОСНОВНЫЕ ЭЛЕМЕНТЫ БЛОК-СХЕМ АЛГОРИТМА
- начало или конец, прерывание
- программный ввод и вывод данных
 |
- ввод данных с клавиатуры
 |
- вывод данных на экран
 |
- вывод данных на печать
 |
- условный оператор
- блок модификации (задание параметров цикла)
 |
- блок вычислений
ЧИСЛЕННЫЕ МЕТОДЫ ВЫЧИСЛЕНИЯ ОПРЕДЕЛЁННЫХ ИНТЕГРАЛОВ
ЗАДАЧА
Вычислить
определённый интеграл:  .
.
В случае, если данный интеграл нельзя представить в виде комбинации табличных интегралов, то прибегают к численным методам решения интеграла. Исходят из того, что определённый интеграл – это есть некоторая площадь, ограниченная кривой графика функции f(x) и пределами a и b.
 |
На каждом из интервалов заменяют функцию f(x) некоторой функцией F(x), причём f(x) ≈ F(x).
F(x) – кусочная функция (линейная или нелинейная).
1. Метод прямоугольников.
При этом методе функция на каждом элементарном интервале заменяется постоянной величиной равной значению функции в начале, конце или середине интервала. Поэтому различают метод внутренних, внешних или средних прямоугольников.
Для метода внутренних прямоугольников:
где ![]() -
шаг интегрирования.
-
шаг интегрирования.
Для метода внешних прямоугольников:
Для метода средних прямоугольников:
2. Метод трапеций.
При этом методе функция заменяется на каждом интервале линейной функцией, совпадающей с началом и концом.
 |
![]()

ЗАДАЧА КОШИ. КОНЕЧНО-РАЗНОСТНЫЕ УРАВНЕНИЯ.
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЧИСЛЕННЫХ МЕТОДОВ
РЕШЕНИЯ ОБЫЧНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Для моделирования динамики объектов на цифровой ЭВМ математическое описание объекта должно быть проверено в форме Коши, т.е. представлена в виде системы дифференциальных уравнений первого порядка, разрешённых относительно производных:
![]()
 (1)
(1)
где y1,…,yn – зависимые переменные;
t – независимая переменная.
(1) – математическое описание объекта, записанное в форме Коши.
Любое дифференциальное уравнение высшего порядка можно привести к системе уравнений первого порядка, путём введения дополнительных переменных:
![]()
![]()
Решаем систему (1) при заданных начальных условиях.
НУ: t = t0, y1(t0) = y10,…, yj(t0) = yj0,…, yn(t0) = yn0.
Обычно t0 = 0.
Определить: y1(t), y2(t),…, yn(t).
Решается путём численного интегрирования дифференциальных уравнений системы (1) и называется задачей Коши:
где  -
вектор переменных состояния объекта;
-
вектор переменных состояния объекта;
![]() -
вектор - функция
-
вектор - функция
Все численные методы интегрирования системы обычных дифференциальных уравнений основаны на том, что начиная с t0 меняют независимую переменную t с приращением ∆t.
![]()
где h – шаг интегрирования.
Находят
последующие значения переменной ![]() , начиная с
начальных значений
, начиная с
начальных значений ![]() и заканчивая
и заканчивая ![]() .
.
Каждое последующее значение зависимой переменной (значение в конце шага):
![]()
Приращение переменной на шаге интегрирования определяется исходя из дифференциальных уравнений, представленных в конечно-разностной форме:
![]()
![]()
где ![]() -
значение функции в некоторой точке ε на (i + 1) шаге, при которой вычисляется
значение производной
-
значение функции в некоторой точке ε на (i + 1) шаге, при которой вычисляется
значение производной ![]() .
.
Численные методы интегрирования отличаются точкой на шаге интегрирования, в которой берётся производная и количеством ранее определённых значений переменных, которые используются для нахождения приращения.
Если производная берётся в начале шага интегрирования, то такие методы называются явными.
Если производная берётся не в начале шага интегрирования, то такие методы называются неявными. Интегрирование неявными методами осуществляется в виде нескольких итераций на каждом из шагов интегрирования. Количество приближений (итераций) определяет порядок метода.
ПРЯМОЙ МЕТОД ЭЙЛЕРА
Прямой метод Эйлера является явным методом и предполагает вычисление приращения функции исходя из производной, взятой в начале шага.
 |
.εi ~ h2
![]()
![]()
![]()
 |
 |
Переход к форме Коши:
 |
Программа
10 CLS: SCREEN 2
20 DATA 500, 100, 0.4, 0.000002
30 READ E, R, L, C
40 I=0: Q=0: t=0: Im=0: Qm=0
50 h=6.28*SQR(L*C)/100
60 FOR K=1 TO 1000
70 dQ=h*I
80 dI=h*(E-R*I-Q/C)/L
90 IF t<3.14*SQR(L*C) AND I>Im THEN Im=I
100 IF t<3.14*SQR(L*C) AND Q>Qm THEN Qm=Q
110 t=t+h: I=I+dI: Q=Q+dQ
120 PSET (20+K, 100-I*20)
130 PSET (20+K, 100-Q*10000)
140 PSET (20+K, 100)
141 PSET (320+I*20, 100-Q*10000)
150 NEXT K
160 FOR j=0 TO 640 STEP 10
170 LINE (0, 0+j)-(640, 0+j)
180 NEXT j
190 FOR M=0 TO 640 STEP 20
200 LINE (0+M, 0)-(0+M, 640)
210 NEXT M
220 ‘Imax=’: Im: ‘Qmax=’: Qm
230 END
ОБРАТНЫЙ МЕТОД ЭЙЛЕРА
![]()
При обратном методе Эйлера значение функции в конце шага вычисляется как значение функции в начале шага плюс приращение, которое определяется, исходя из производной функции, взятой в конце шага, поэтому метод является неявным.
 |
Метод является жёстко устойчивым.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.